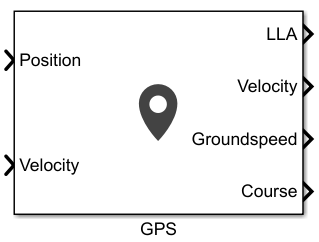
GPS
Simuler les relevés d'un capteur GPS avec du bruit
Depuis R2021b
Bibliothèques :
UAV Toolbox /
UAV Scenario and Sensor Modeling
Navigation Toolbox /
Multisensor Positioning /
Sensor Models
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Sensor Models
Description
Ce bloc génère des mesures GPS bruitées en fonction de la position et de la vitesse d'entrée dans le repère local ou le repère géodésique. Il utilise le modèle terrestre WGS84 pour convertir les coordonnées locales en coordonnées LLA (latitude-longitude-altitude).
Exemples
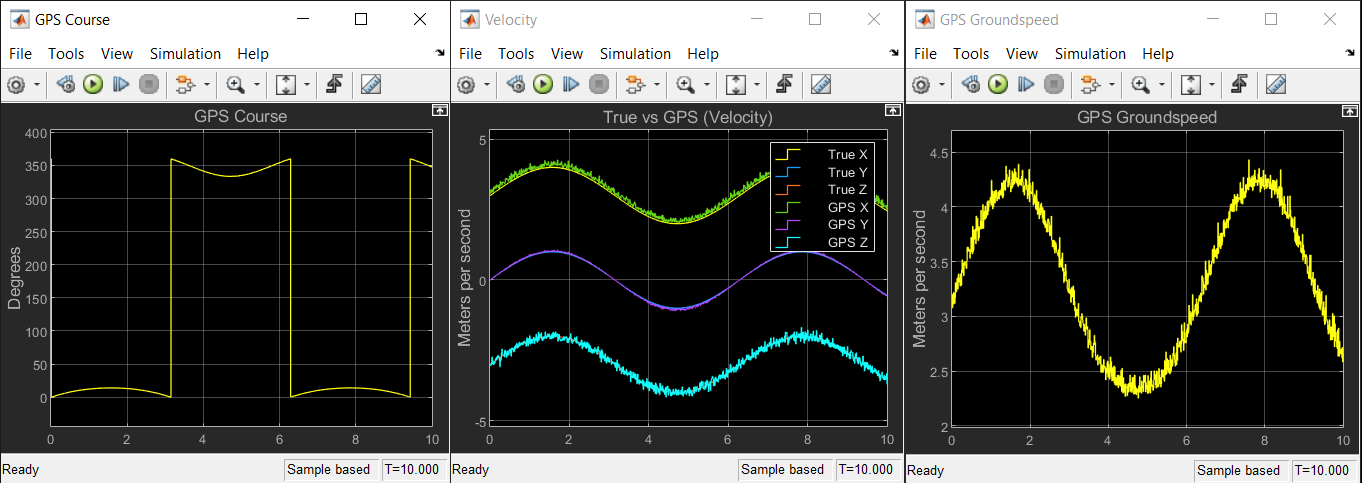
Simulate GPS Sensor Noise
Use the GPS block to add GPS sensor noise to position and velocity inputs in Simulink®.
Ports
Entrée
Spécifiez la position d'entrée du récepteur GPS dans le système de coordonnées de navigation sous la forme d'une matrice réelle finie Nx3. N représente le nombre d'échantillons dans la trame actuelle. Le format des lignes de la matrice diffère en fonction de la valeur du paramètre Position input format.
Si la valeur du paramètre Position input format est
Local, spécifiez chaque ligne du Position comme des coordonnées cartésiennes en mètres par rapport au repère local de navigation, spécifié par le paramètre Reference frame, l'origine étant spécifiée par le paramètre Reference location.Si la valeur du paramètre Position input format est
Geodetic, spécifiez chaque ligne de l'entrée Position comme des coordonnées géodésiques de la forme[latitude longitude altitude]. Les valeurs delatitudeetlongitudesont exprimées en degrés.Altitudereprésente la hauteur au-dessus du modèle ellipsoïdal WGS84, en mètres.
Types de données : single | double
Spécifiez la vitesse d'entrée du récepteur GPS dans le système de coordonnées de navigation en mètres par seconde sous la forme d'une matrice réelle finie Nx3. N est le nombre d'échantillons dans la trame actuelle. Le format des lignes de la matrice diffère en fonction de la valeur du paramètre Position input format.
Si la valeur du paramètre Position input format est
Local, spécifiez chaque ligne du Velocity par rapport au repère local de navigation (NED ou ENU), spécifié par le paramètre Reference frame, avec l'origine spécifiée par le paramètre Reference location.Si la valeur du paramètre Position input format est
Geodetic, spécifiez chaque ligne du Velocity par rapport au repère de navigation (NED ou ENU), spécifié par le paramètre Reference frame, avec l'origine spécifiée par Position.
Types de données : single | double
Sortie
Position du récepteur GPS dans le système de coordonnées géodésiques de latitude, longitude et altitude (LLA), renvoyée sous forme d'un tableau réel et fini Nx3. La latitude et la longitude sont exprimées en degrés, le nord et l'est étant positifs. L'altitude est exprimée en mètres.
N représente le nombre d'échantillons dans la trame actuelle.
Types de données : single | double
Vitesse du récepteur GPS dans le système de coordonnées locales de navigation, exprimée en mètres par seconde et renvoyée sous forme d'une matrice réelle finie Nx3. N représente le nombre d'échantillons dans la trame courante. Le format des lignes de la matrice diffère en fonction de la valeur du paramètre Position input format.
Si la valeur du paramètre Position input format est
Local, la sortie Velocity est par rapport au repère de navigation local (NED ou ENU), spécifié par le paramètre Reference frame, avec l'origine spécifiée par le paramètre Reference location.Si la valeur du paramètre Position input format est
Geodetic, la sortie Velocity est par rapport au repère de navigation (NED ou ENU), spécifié par le paramètre Reference frame, avec l'origine spécifiée par LLA.
Types de données : single | double
Magnitude de la vitesse horizontale du récepteur GPS dans le système de coordonnées locales de navigation en mètres par seconde, renvoyée sous forme de vecteur colonne réel à éléments finis N.
N représente le nombre d'échantillons dans la trame actuelle.
Types de données : single | double
Direction de la vitesse horizontale du récepteur GPS dans le système de coordonnées locales de navigation, en degrés, renvoyée sous forme de vecteur colonne réel à éléments finis N de valeurs de 0 à 360. Le nord correspond à 0 degré et l'est à 90 degrés.
N représente le nombre d'échantillons dans la trame actuelle.
Types de données : single | double
Paramètres
Spécifiez le cadre de référence comme NED (Nord-Est-Bas) ou ENU (Est-Nord-Haut).
Spécifiez le format d'entrée des coordonnées de position comme Local ou Geodetic.
Si vous définissez ce paramètre sur
Local, alors l'entrée du port Position doit être sous la forme de coordonnées cartésiennes par rapport au repère local de navigation, spécifié par le paramètre Reference Frame, avec l'origine fixe et définie par le paramètre Reference location. L'entrée du port d'entrée Velocity doit également être effectuée par rapport à ce repère local de navigation.Si vous définissez ce paramètre sur
Geodetic, alors l'entrée du port Position doit être des coordonnées géodésiques en[latitude longitude altitude]. L'entrée du port d'entrée Velocity doit également être par rapport au repère de navigation spécifié par le paramètre Reference frame, l'origine correspondant au port Position.
Spécifiez l'origine du cadre de référence locale comme un vecteur ligne à trois éléments en coordonnées géodésiques [latitude longitude altitude], où altitude est la hauteur au-dessus du modèle d'ellipsoïde de référence WGS84. Les valeurs de localisation de référence sont exprimées respectivement en degrés, degrés et mètres. Le format de degré est le degré décimal (DD).
Dépendances
Pour activer ce paramètre, définissez le paramètre Position input format sur Local.
Spécifiez la précision de la position horizontale sous forme d'un scalaire réel non négatif en mètres. La précision de la position horizontale spécifie l'écart type du bruit dans la mesure de la position horizontale. Augmenter cette valeur ajoute du bruit à la mesure, ce qui diminue sa précision.
Ajustable : Yes
Spécifiez la précision de la position verticale sous forme d'un scalaire réel non négatif en mètres. La précision de la position verticale spécifie l'écart type du bruit dans la mesure de la position verticale. Augmenter cette valeur ajoute du bruit à la mesure, ce qui diminue sa précision.
Ajustable : Yes
Spécifiez la précision de la vitesse par seconde sous forme d'un scalaire réel non négatif en mètres. La précision de la vitesse spécifie l'écart type du bruit dans la mesure de la vitesse. Augmenter cette valeur ajoute du bruit à la mesure, ce qui diminue sa précision.
Ajustable : Yes
Spécifiez le facteur d'atténuation du bruit de position globale comme un scalaire numérique dans la plage [0, 1]. Un facteur de décroissance de 0 modélise le bruit de position globale comme un processus de bruit blanc. Un facteur de décroissance de 1 modélise le bruit de position globale comme un processus de marche aléatoire.
Ajustable : Yes
Spécifiez la valeur initiale d'un algorithme de générateur de nombres aléatoires mt19937ar comme un entier non négatif.
Sélectionnez le type de simulation à exécuter parmi ces options :
Interpreted execution: Simuler le modèle à l'aide de l'interpréteur MATLAB®. Pour plus d'informations, consulter Interpreted Execution vs. Code Generation.Code generation: Simuler le modèle à l'aide du code C généré. Lors de la première exécution d'une simulation, Simulink® génère du code C pour le bloc. Le code C est réutilisé pour les simulations suivantes, tant que le modèle reste inchangé.
Capacités étendues
Génération de code C/C++
Générez du code C et C++ avec Simulink® Coder™.
Historique des versions
Introduit dans R2021b
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Sélectionner un site web
Choisissez un site web pour accéder au contenu traduit dans votre langue (lorsqu'il est disponible) et voir les événements et les offres locales. D’après votre position, nous vous recommandons de sélectionner la région suivante : .
Vous pouvez également sélectionner un site web dans la liste suivante :
Comment optimiser les performances du site
Pour optimiser les performances du site, sélectionnez la région Chine (en chinois ou en anglais). Les sites de MathWorks pour les autres pays ne sont pas optimisés pour les visites provenant de votre région.
Amériques
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)