IMU
Modèle de simulation IMU

Bibliothèques :
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Sensor Models
Navigation Toolbox /
Multisensor Positioning /
Sensor Models
Description
Les modèles de blocs IMU Simulink® reçoivent des données d'une unité de mesure inertielle (IMU) composée de capteurs accéléromètre, gyroscope et magnétomètre. Vous pouvez spécifier le cadre de référence des entrées de bloc comme cadre NED (Nord-Est-Bas) ou ENU (Est-Nord-Up) en utilisant le paramètre Reference Frame.
Exemples
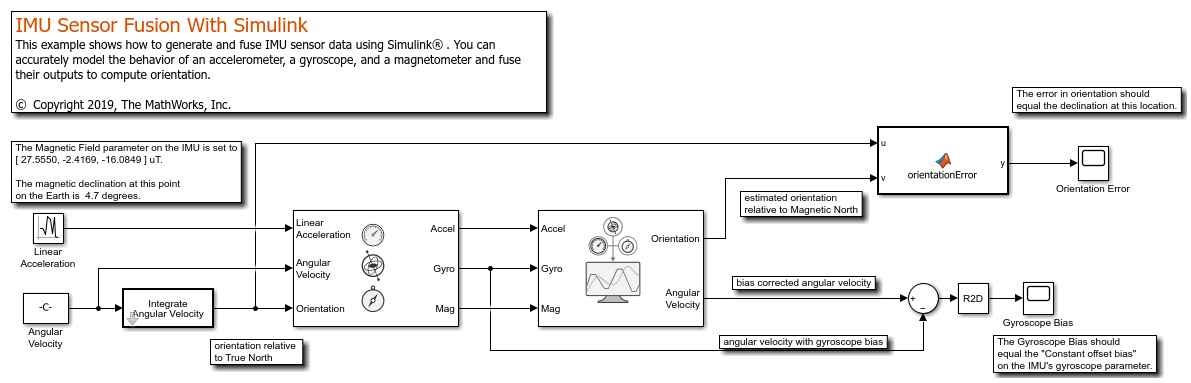
IMU Sensor Fusion with Simulink
Generate and fuse IMU sensor data using Simulink®. You can accurately model the behavior of an accelerometer, a gyroscope, and a magnetometer and fuse their outputs to compute orientation.
Ports
Entrée
Sortir
Paramètres
Algorithmes
La description de l'algorithme suivante suppose une trame de navigation NED. Le modèle d'accéléromètre utilise les entrées d'orientation et d'accélération de la vérité terrain ainsi que les propriétés imuSensor et accelparams pour modéliser les lectures de l'accéléromètre.

Pour obtenir l'accélération totale (totalAcc), l'accélération est prétraitée en niant et en ajoutant le vecteur constant de gravité (g= [0; 0; 9,8] m/sTG en supposant une trame NED) comme :
Le terme acceleration est annulé pour obtenir des lectures d'accélération totale nulle lorsque l'accéléromètre est dans un environnement libre. automne. Le terme acceleration est également connu sous le nom de force spécifique.
Ensuite, l'accélération totale est convertie du référentiel de navigation local vers le référentiel du capteur en utilisant :
Si l'orientation est saisie sous forme de quaternion, elle est convertie en matrice de rotation avant traitement.
L'accélération de la vérité terrain dans le cadre du capteur, a, passe par le modèle global, qui ajoute un désalignement et un biais des axes :
où ConstantBias est une propriété de accelparams, et α 1 , α 2 et α 3 sont donnés par les premier, deuxième et troisième éléments de la propriété AxesMisalignment de accelparams.
La dérive d'instabilité de biais β 1 est modélisée comme un bruit blanc biaisé puis filtrée :
où k est l'indice de pas de temps discret, BiasInstability est une propriété de accelparams, w est bruit blanc qui suit une distribution normale de moyenne 0 et de variance 1. La taille du pas de temps discret est l'inverse de la propriété SampleRate . [g 1 , g 2 , …, g n+1 ] sont les coefficients du dénominateur spécifié dans la propriété BiasInstabilityCoefficients de l'objet accelparams . [g 1 , g 2 , …, g m+1 ] sont les coefficients du numérateur de la propriété BiasInstabilityCoefficients . n et m sont les ordres des coefficients du dénominateur et du numérateur, respectivement.
La dérive du bruit blanc est modélisée en multipliant les éléments du flux aléatoire de bruit blanc par l'écart type :
où w est le bruit blanc qui suit une distribution normale de moyenne 0 et variance de 1, SampleRate est une propriété imuSensor , et NoiseDensity est une propriété accelparams . La variable d'échelle s = 2 si la propriété NoiseType de l'objet accelparams est double face et s = 1 si la propriété NoiseType est simple face.
La dérive de marche aléatoire est modélisée en polarisant les éléments du flux aléatoire de bruit blanc puis en filtrant :
où k est l'indice de pas de temps discret, RandomWalk est une propriété de accelparams, SampleRate est une propriété de imuSensor, w est un bruit blanc qui suit une distribution normale de moyenne 0 et de variance de 1. La taille du pas de temps discret est l'inverse de la propriété SampleRate . La variable d'échelle s = 2 si la propriété NoiseType de l'objet accelparams est double face et s = 1 si la propriété NoiseType est simple face.
Le bruit de dérive environnementale est modélisé en multipliant la différence de température par rapport à une norme avec le biais de température :
où Temperature est une propriété de imuSensor, et TemperatureBias est une propriété de accelparams. La constante 25 correspond à une température standard.
L'erreur du facteur d'échelle de température est modélisée comme :
où Temperature est une propriété de imuSensor et TemperatureScaleFactor est une propriété de accelparams. La constante 25 correspond à une température standard.
La quantification est modélisée en saturant d'abord le modèle de signal continu :
, puis en définissant la résolution :
où MeasurementRange est une propriété de accelparams.
La description de l'algorithme suivante suppose une trame de navigation NED. Le modèle de gyroscope utilise les entrées d'orientation, d'accélération et de vitesse angulaire de la vérité terrain, ainsi que les propriétés imuSensor et gyroparams pour modéliser les lectures de l'accéléromètre.

La vitesse angulaire de la vérité terrain est convertie du cadre local au cadre du capteur en utilisant l'orientation de la vérité terrain :
Si l'orientation est saisie sous forme de quaternion, elle est convertie en matrice de rotation avant traitement.
La vitesse angulaire de la vérité terrain dans le cadre du capteur, a, passe par le modèle global, ce qui ajoute un désalignement et un biais des axes :
où ConstantBias est une propriété de gyroparams, et α 1 , α 2 et α 3 sont donnés par les premier, deuxième et troisième éléments de la propriété AxesMisalignment de gyroparams.
La dérive d'instabilité de biais β 1 est modélisée comme un bruit blanc biaisé puis filtrée :
où k est l'indice de pas de temps discret, BiasInstability est une propriété de gyroparams, w est bruit blanc qui suit une distribution normale de moyenne 0 et de variance 1. La taille du pas de temps discret est l'inverse de la propriété SampleRate . [g 1 , g 2 , …, g n+1 ] sont les coefficients du dénominateur spécifié dans la propriété BiasInstabilityCoefficients de l'objet gyroparams . [g 1 , g 2 , …, g m+1 ] sont les coefficients du numérateur de la propriété BiasInstabilityCoefficients . n et m sont les ordres des coefficients du dénominateur et du numérateur, respectivement.
La dérive du bruit blanc est modélisée en multipliant les éléments du flux aléatoire de bruit blanc par l'écart type :
où w est le bruit blanc qui suit une distribution normale de moyenne 0 et variance de 1, SampleRate est une propriété imuSensor , et NoiseDensity est une propriété gyroparams . La variable d'échelle s = 2 si la propriété NoiseType de l'objet gyroparams est double face et s = 1 si la propriété NoiseType est simple face.
La dérive de marche aléatoire est modélisée en polarisant les éléments du flux aléatoire de bruit blanc puis en filtrant :
où k est l'indice de pas de temps discret, RandomWalk est une propriété de gyroparams, SampleRate est une propriété de imuSensor, et w est un bruit blanc qui suit une distribution normale de moyenne 0 et de variance de 1. La taille du pas de temps discret est l'inverse de la propriété SampleRate . La variable d'échelle s = 2 si la propriété NoiseType de l'objet gyroparams est double face et s = 1 si la propriété NoiseType est simple face.
Le bruit de dérive environnementale est modélisé en multipliant la différence de température par rapport à une norme avec le biais de température :
où Temperature est une propriété de imuSensor, et TemperatureBias est une propriété de gyroparams. La constante 25 correspond à une température standard.
La dérive du biais d'accélération est modélisée en multipliant l'entrée d'accélération et le biais d'accélération :
où AccelerationBias est une propriété de gyroparams.
L'erreur du facteur d'échelle de température est modélisée comme :
où Temperature est une propriété de imuSensor et TemperatureScaleFactor est une propriété de gyroparams. La constante 25 correspond à une température standard.
La quantification est modélisée en saturant d'abord le modèle de signal continu :
, puis en définissant la résolution :
où MeasurementRange est une propriété de gyroparams.
La description de l'algorithme suivante suppose une trame de navigation NED. Le modèle du magnétomètre utilise les entrées d'orientation et d'accélération de la vérité terrain, ainsi que les propriétés imuSensor et magparams pour modéliser les lectures du magnétomètre.

L'accélération de la vérité terrain est convertie du référentiel local vers le référentiel du capteur en utilisant l'orientation vérité terrain :
Si l'orientation est saisie sous forme de quaternion, elle est convertie en matrice de rotation avant traitement.
L'accélération de la vérité terrain dans le cadre du capteur, a, passe par le modèle global, qui ajoute un désalignement et un biais des axes :
où ConstantBias est une propriété de magparams, et α 1 , α 2 et α 3 sont donnés par les premier, deuxième et troisième éléments de la propriété AxesMisalignment de magparams.
La dérive d'instabilité de biais β 1 modélisée comme un bruit blanc biaisé puis filtrée :
où k est l'indice de pas de temps discret, BiasInstability est une propriété de magparams, w est bruit blanc qui suit une distribution normale de moyenne 0 et de variance 1. La taille du pas de temps discret est l'inverse de la propriété SampleRate . [g 1 , g 2 , …, g n+1 ] sont les coefficients du dénominateur spécifié dans la propriété BiasInstabilityCoefficients de l'objet magparams . [g 1 , g 2 , …, g m+1 ] sont les coefficients du numérateur de la propriété BiasInstabilityCoefficients . n et m sont les ordres des coefficients du dénominateur et du numérateur, respectivement.
La dérive du bruit blanc est modélisée en multipliant les éléments du flux aléatoire de bruit blanc par l'écart type :
où w est le bruit blanc qui suit une distribution normale de moyenne 0 et variance de 1, SampleRate est une propriété imuSensor , et NoiseDensity est une propriété magparams . La variable d'échelle s = 2 si la propriété NoiseType de l'objet magparams est double face et s = 1 si la propriété NoiseType est simple face.
La dérive de marche aléatoire est modélisée en polarisant les éléments du flux aléatoire de bruit blanc puis en filtrant :
où k est l'indice de pas de temps discret, RandomWalk est une propriété de magparams, SampleRate est une propriété de imuSensor, w est un bruit blanc qui suit une distribution normale de moyenne 0 et de variance de 1. La taille du pas de temps discret est l'inverse de la propriété SampleRate . La variable d'échelle s = 2 si la propriété NoiseType de l'objet magparams est double face et s = 1 si la propriété NoiseType est simple face.
Le bruit de dérive environnementale est modélisé en multipliant la différence de température par rapport à une norme avec le biais de température :
où Temperature est une propriété de imuSensor, et TemperatureBias est une propriété de magparams. La constante 25 correspond à une température standard.
L'erreur du facteur d'échelle de température est modélisée comme :
où Temperature est une propriété de imuSensor et TemperatureScaleFactor est une propriété de magparams. La constante 25 correspond à une température standard.
La quantification est modélisée en saturant d'abord le modèle de signal continu :
, puis en définissant la résolution :
où MeasurementRange est une propriété de magparams.
Capacités étendues
Historique des versions
Introduit dans R2020a