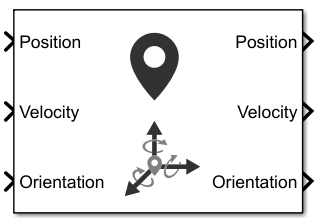
INS
Simuler le capteur INS
Bibliothèques :
Navigation Toolbox /
Multisensor Positioning /
Sensor Models
Automated Driving Toolbox /
Driving Scenario and Sensor Modeling
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Sensor Models
UAV Toolbox /
UAV Scenario and Sensor Modeling
Description
Le bloc simule un capteur INS, qui génère une position, une vitesse et une orientation corrompues par le bruit en fonction des entrées correspondantes. Le bloc peut également éventuellement générer une accélération et une vitesse angulaire en fonction des entrées correspondantes. Pour modifier le niveau de bruit présent dans la sortie, vous pouvez faire varier les précisions de roulis, de tangage, de lacet, de position, de vitesse, d'accélération et de vitesse angulaire. La précision est définie comme l'écart type du bruit.
Exemples

Simulate INS Block
In this example, you simulate an INS block by using the pose information of a vehicle undertaking a left-turn trajectory.
Ports
Saisir
Position du capteur INS par rapport au référentiel de navigation, en mètres, spécifiée sous la forme d'une matrice à valeur réelle N-by-3. N est le nombre d’échantillons.
Types de données : single | double
Vitesse du capteur INS par rapport au cadre de navigation, en mètres par seconde, spécifiée sous la forme d'une matrice à valeur réelle N-by-3. N est le nombre d’échantillons.
Types de données : single | double
Orientation du capteur INS par rapport au repère de navigation, spécifiée dans l'un de ces formats :
Un tableau à valeur réelle 3 par 3 par N , où chaque page du tableau (matrice 3 par 3) est une matrice de rotation.
Une matrice à valeurs réelles N-by-4, où chaque ligne de la matrice représente les quatre éléments d'un quaternion.
Une N-by-3 d'angles d'Euler, où chaque ligne de la matrice correspond aux trois angles d'Euler correspondant à la convention de rotation zyx.
N est le nombre d’échantillons.
Types de données : single | double
Accélération du capteur INS par rapport au référentiel de navigation, en mètres par seconde carrée, spécifiée sous la forme d'une matrice à valeur réelle N-by-3. N est le nombre d’échantillons.
Dépendances
Pour activer ce port d'entrée, sélectionnez Use acceleration and angular velocity.
Types de données : single | double
Vitesse angulaire du capteur INS par rapport au cadre de navigation, en degrés par seconde, spécifiée sous la forme d'une matrice à valeur réelle N-by-3. N est le nombre d’échantillons.
Dépendances
Pour activer ce port d'entrée, sélectionnez Use acceleration and angular velocity.
Types de données : single | double
Activez le correctif GNNS, spécifié comme vecteur logique N-by-1. N est le nombre d’échantillons. Spécifiez cette entrée comme false pour simuler la perte d'un correctif de récepteur GNSS. Lorsqu'un repère de récepteur GNSS est perdu, les mesures de position dérivent à un taux spécifié par le paramètre Position error factor .
Dépendances
Pour activer ce port d'entrée, sélectionnez Enable HasGNSSFix port.
Types de données : single | double
Sortir
Position du capteur INS par rapport au référentiel de navigation, en mètres, renvoyée sous la forme d'une matrice à valeur réelle N-by-3. N est le nombre d’échantillons dans l’entrée.
Types de données : single | double
Vitesse du capteur INS par rapport au cadre de navigation, en mètres par seconde, renvoyée sous la forme d'une matrice à valeur réelle N-by-3. N est le nombre d’échantillons dans l’entrée.
Types de données : single | double
Orientation du capteur INS par rapport au repère de navigation, renvoyée selon l'un des formats :
Un tableau à valeur réelle 3 par 3 par N , où chaque page du tableau (matrice 3 par 3) est une matrice de rotation.
Une matrice à valeurs réelles N-by-4, où chaque ligne de la matrice représente les quatre éléments d'un quaternion.
Une N-by-3 d'angles d'Euler, où chaque ligne de la matrice correspond aux trois angles d'Euler correspondant à la convention de rotation zyx.
N est le nombre d’échantillons dans l’entrée.
Types de données : single | double
Accélération du capteur INS par rapport au cadre de navigation, en mètres par seconde carrée, renvoyée sous la forme d'une matrice à valeur réelle N-by-3. N est le nombre d’échantillons.
Dépendances
Pour activer ce port de sortie, sélectionnez Use acceleration and angular velocity.
Types de données : single | double
Vitesse angulaire du capteur INS par rapport au cadre de navigation, en degrés par seconde, renvoyée sous la forme d'une matrice à valeur réelle N-by-3. N est le nombre d’échantillons.
Dépendances
Pour activer ce port de sortie, sélectionnez Use acceleration and angular velocity.
Types de données : single | double
Paramètres
Emplacement du capteur sur la plate-forme, en mètres, spécifié sous la forme d'un vecteur à valeur réelle à trois éléments de la forme [x y z]. Le vecteur définit le décalage de l'origine du capteur par rapport à l'origine de la plateforme.
Types de données : single | double
Précision de la mesure du roulis du corps du capteur en degrés, spécifiée comme un scalaire réel non négatif.
Le roulis est défini comme une rotation autour de l' x du corps du capteur. Le bruit de roulement est modélisé comme un bruit de processus blanc avec un écart type égal au Roll accuracy spécifié en degrés.
Types de données : single | double
Précision de la mesure du pas du corps du capteur en degrés, spécifiée comme un scalaire réel non négatif.
Le pas est défini comme la rotation autour de l' y du corps du capteur. Le bruit de pitch est modélisé comme un bruit de processus blanc avec un écart type égal au Pitch accuracy spécifié en degrés.
Types de données : single | double
Précision de la mesure du lacet du corps du capteur en degrés, spécifiée comme un scalaire réel non négatif.
Le lacet est défini comme une rotation autour de l' z du corps du capteur. Le bruit de lacet est modélisé comme un bruit de processus blanc avec un écart type égal au Yaw accuracy spécifié en degrés.
Types de données : single | double
Précision de la mesure de la position du corps du capteur en mètres, spécifiée sous forme d'un scalaire réel non négatif ou d'un vecteur 1 x 3 de valeurs non négatives. Si vous spécifiez le paramètre sous forme de valeur scalaire, le bloc définit la précision des trois composants de position sur cette valeur.
Le bruit de position est modélisé comme un bruit de processus blanc avec un écart type égal au Position accuracy spécifié en mètres.
Types de données : single | double
Précision de la mesure de la vitesse du corps du capteur en mètres par seconde, spécifiée comme un scalaire réel non négatif.
Le bruit de vitesse est modélisé comme un bruit de processus blanc avec un écart type égal au Velocity accuracy spécifié en mètres par seconde.
Types de données : single | double
Cochez cette case pour activer les entrées de bloc d'accélération et de vitesse angulaire via les ports d'entrée Acceleration et AngularVelocity , respectivement. Pendant ce temps, le bloc génère les mesures d'accélération et de vitesse angulaire via les ports de sortie Acceleration et AngularVelocity , respectivement. De plus, la sélection de ce paramètre vous permet de spécifier les paramètres Acceleration accuracy et Angular velocity accuracy .
Précision de la mesure de l'accélération du corps du capteur en mètres, spécifiée comme un scalaire réel non négatif.
Le bruit d'accélération est modélisé comme un bruit de processus blanc avec un écart type égal au Acceleration accuracy spécifié en mètres par seconde carrée.
Dépendances
Pour activer ce paramètre, sélectionnez Use acceleration and angular velocity.
Types de données : single | double
Précision de la mesure de la vitesse angulaire du corps du capteur en mètres, spécifiée comme un scalaire réel non négatif.
Le bruit de vitesse angulaire est modélisé comme un bruit de processus blanc avec un écart type égal au Angular velocity accuracy spécifié en degrés par seconde.
Dépendances
Pour activer ce paramètre, sélectionnez Use acceleration and angular velocity.
Types de données : single | double
Cochez cette case pour activer le port d'entrée HasGNSSFix . Lorsque l'entrée HasGNSSFix est spécifiée comme false, les mesures de position dérivent à une vitesse spécifiée par le paramètre Position error factor .
Facteur d'erreur de position sans correctif GNSS, spécifié sous forme de scalaire ou de vecteur à valeur réelle 1 x 3. Si vous spécifiez le paramètre sous forme de valeur scalaire, le bloc définit les facteurs d'erreur de position des trois composants de position sur cette valeur.
Lorsque l'entrée HasGNSSFix est spécifiée comme false, l'erreur de position augmente à un taux quadratique en raison d'un biais constant dans l'accéléromètre. L'erreur de position pour un composant de position E(t) peut être exprimée comme E(t) = 1/2α t 2, où α est le facteur d'erreur de position pour le correspondant composant et t est le temps écoulé depuis la perte du correctif GNSS. Les valeurs E(t) calculées pour les x, y et z Les composants sont ajoutés aux composants de position correspondants de la sortie Position .
Dépendances
Pour activer ce paramètre, sélectionnez Enable HasGNSSFix port.
Types de données : double
Graine initiale d'un algorithme générateur de nombres aléatoires, spécifiée comme un entier non négatif.
Types de données : single | double
Interpreted execution— Simulez le modèle à l'aide de l'interpréteur MATLAB® . Cette option réduit le temps de démarrage. En modeInterpreted execution, vous pouvez déboguer le code source du bloc.Code generation— Simulez le modèle à l'aide du code C généré. La première fois que vous exécutez une simulation, Simulink® génère du code C pour le bloc. Le code C est réutilisé pour les simulations ultérieures si le modèle ne change pas. Cette option nécessite un temps de démarrage supplémentaire.
Capacités étendues
Génération de code C/C++
Générez du code C et C++ avec Simulink® Coder™.
Historique des versions
Introduit dans R2020b
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Sélectionner un site web
Choisissez un site web pour accéder au contenu traduit dans votre langue (lorsqu'il est disponible) et voir les événements et les offres locales. D’après votre position, nous vous recommandons de sélectionner la région suivante : .
Vous pouvez également sélectionner un site web dans la liste suivante :
Comment optimiser les performances du site
Pour optimiser les performances du site, sélectionnez la région Chine (en chinois ou en anglais). Les sites de MathWorks pour les autres pays ne sont pas optimisés pour les visites provenant de votre région.
Amériques
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)