mpnetSE2
Description
L'objet mpnetSE2 stocke les réseaux de planification de mouvement (MPNet) à utiliser pour l'échantillonnage de l'espace d'état. MPNet est une approche basée sur l'apprentissage en profondeur qui utilise des réseaux de neurones pour effectuer un échantillonnage éclairé. MPNet utilise des connaissances préalables pour trouver des échantillons d'état optimaux pour la planification de mouvements à l'aide de différents planificateurs. Grâce à cet objet, vous pouvez :
Chargez un MPNet pré-entraîné et utilisez-le pour l'échantillonnage de l'espace d'état.
Configurez un MPNet non entraîné pour s'entraîner sur un nouvel ensemble de données. Ensuite, utilisez le MPNet formé pour l’échantillonnage de l’espace d’état.
Utilisez la fonction predict de l'objet mpnetSE2 pour prédire des échantillons d'état entre une pose de départ et une pose d'objectif dans un environnement d'entrée connu ou inconnu. Utilisez la fonction loss de l'objet mpnetSE2 pour calculer les pertes lors de la formation du réseau.
Création
Description
mpnet = mpnetSE2trainnet (Deep Learning Toolbox) .
mpnet = mpnetSE2(Name=Value)Network, StateBounds, LossWeights et EncodingSize comme arguments nom-valeur. .
Utilisez la propriété Network pour stocker un réseau neuronal profond que vous pouvez utiliser pour rechercher des échantillons d'espace d'état dans un environnement inconnu ou connu. Vous pouvez ensuite utiliser les échantillons sélectionnés pour la planification de mouvements à l'aide de différents planificateurs de trajectoire.
Remarque
Pour exécuter cette fonction, vous aurez besoin du Deep Learning Toolbox™.
Propriétés
Fonctions d'objet
Exemples
Entraînez un réseau de planification de mouvement (MPNet), sur un environnement de carte unique, pour l'échantillonnage de l'espace d'état. Dans le cas d'un environnement à carte unique, vous utilisez une carte fixe pour former et tester le réseau. Ensuite, vous pouvez utiliser le réseau entraîné pour calculer des échantillons d'état entre n'importe quelle pose de départ et n'importe quelle pose d'objectif sur la carte. Tout d'abord, vous devez configurer un MPNet et former le réseau sur un petit ensemble de données. Utilisez la perte de formation pour évaluer la précision du réseau. Si vous entraînez le MPNet sur un vaste ensemble de données d'entraînement créé à l'aide de plusieurs environnements cartographiques, vous devez également calculer la perte de validation pour affiner la précision du réseau. Pour plus d'informations sur la façon de former le MPNet sur plusieurs environnements cartographiques pour l'échantillonnage de l'espace d'état, voir Train Deep Learning-Based Sampler for Motion Planning.
Charger et inspecter les données de formation
Chargez la carte d'entrée et les données d'entraînement dans l'espace de travail MATLAB® .
data = load("singleTrainData.mat","trainData","map")
data = struct with fields:
trainData: {100×1 cell}
map: [1×1 binaryOccupancyMap]
map = data.map;
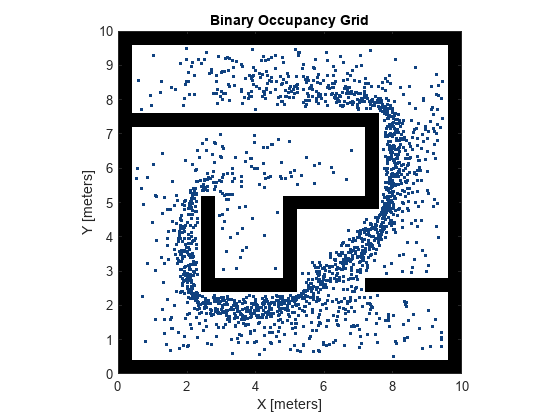
Les données d'entraînement sont constituées d'échantillons d'état optimaux calculés pour plusieurs valeurs aléatoires de poses de départ et de poses d'objectif sur une carte de labyrinthe. Extrayez les données de formation de la structure de données.
trainData = data.trainData;
Inspectez les données d’entraînement. Les données de formation sont un cell array de taille 100 x 1 contenant 100 échantillons d'état à utiliser pour la formation du réseau.
size(trainData)
ans = 1×2
100 1
Lisez les échantillons d'état à partir des données d'entraînement. Tracez la carte d'entrée et les échantillons d'état d'entraînement.
figure show(map) hold on for n = 1:100 pathSample = trainData{n}; plot(pathSample(:,1),pathSample(:,2),plannerLineSpec.state{:}) end hold off
Créer MPNet et définir les paramètres réseau
Créez un MPNet non entraîné à l'aide de l'objet mpnetSE2 .
mpnet = mpnetSE2
mpnet =
mpnetSE2 with properties:
StateBounds: [3×2 double]
LossWeights: [1 1 1]
EncodingSize: [10 10]
NumInputs: 108
NumOutputs: 4
Network: [1×1 dlnetwork]
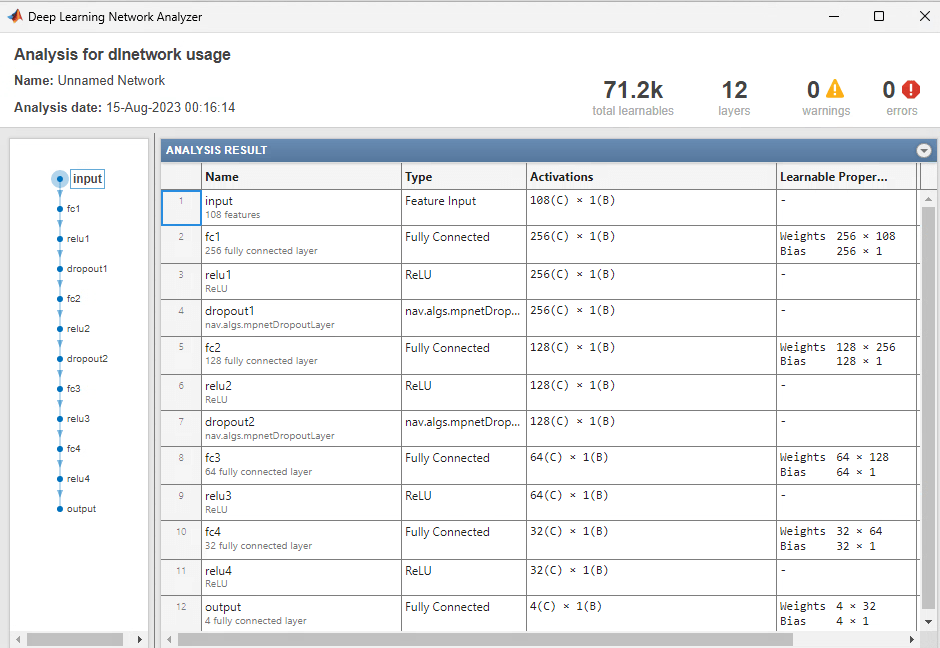
Visualisez le réseau. Pour mieux comprendre l'architecture du réseau, inspectez les couches du réseau et le nombre d'entrées dans chaque couche.
analyzeNetwork(mpnet.Network)
Définissez la propriété StateBounds de l'objet mpnetSE2 sur les limites de la carte d'entrée.
x = map.XWorldLimits; y = map.YWorldLimits; theta = [-pi pi]; stateBounds = [x; y; theta]; mpnet.StateBounds = stateBounds;
Définissez la propriété EncodingSize de l'objet mpnetSE2 sur 0. Cela indique que la fonction ne doit pas coder la carte d'entrée pour entraîner le réseau. La définition de la propriété EncodingSize sur 0 modifie la propriété NumInputs du MPNet en 8.
mpnet.EncodingSize = 0
mpnet =
mpnetSE2 with properties:
StateBounds: [3×2 double]
LossWeights: [1 1 1]
EncodingSize: [0 0]
NumInputs: 8
NumOutputs: 4
Network: [1×1 dlnetwork]
Définissez la propriété LossWeights de l'objet mpnetSE2 sur [10 10 0]. Pour des valeurs de poids plus élevées, le réseau prend plus d’époques pour converger. Si l'entrée est un espace d'état SE(2), la valeur de poids pour la variable de l'espace d'étatest défini sur 0.
mpnet.LossWeights = [10 10 0];
Préparer les données de formation
Préparez les données de formation en convertissant les échantillons dans un format requis pour la formation du MPNet. La fonction mpnetPrepareData redimensionne les valeurs des états de chemin optimaux dans la plage [0, 1] et les stocke en tant qu'objet datastore à utiliser avec la fonction d'entraînement.
dsTrain = mpnetPrepareData(trainData,mpnet);
Former MPNet
Créez un objet trainingOptions pour la formation du MPNet. Ces options de formation ont été choisies expérimentalement. Si vous utilisez un nouvel ensemble de données pour l'entraînement, vous devez modifier vos options d'entraînement pour obtenir la précision d'entraînement souhaitée.
Utilisez l'optimiseur Adam.
Définissez la taille des mini-lots d’entraînement sur 20.
Mélangez la datastore de formation à chaque époque.
Définissez le nombre maximum d'époques sur 50.
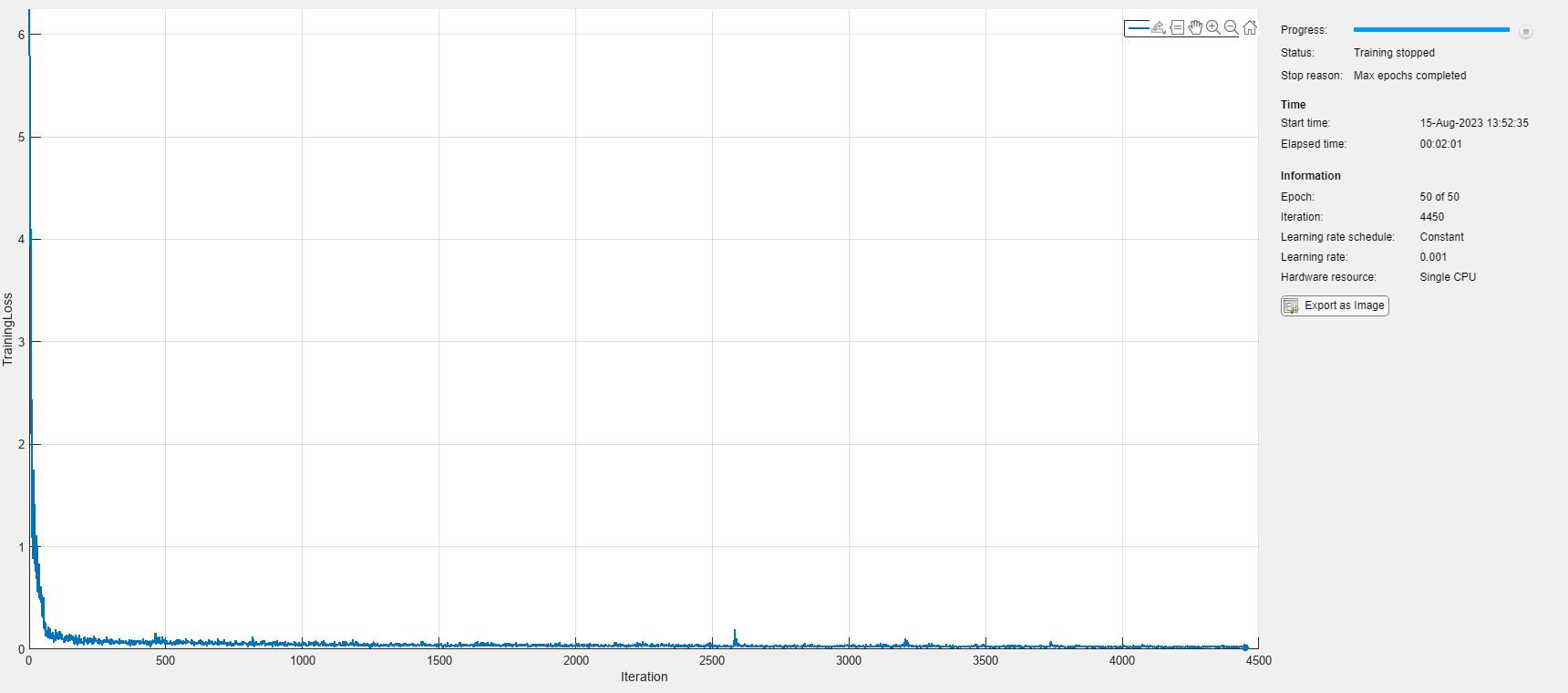
options = trainingOptions("adam", ... MiniBatchSize=20, ... MaxEpochs=50, ... Shuffle="every-epoch", ... Plots="training-progress", ... VerboseFrequency=500);
Entraînez le MPNet en utilisant la fonction trainnet . Spécifiez la fonction de perte et les options de formation comme entrées dans la fonction de formation. Pour des résultats optimaux, la perte d’entraînement doit converger vers zéro.
[net,info] = trainnet(dsTrain,mpnet.Network,@mpnet.loss,options);
Iteration Epoch TimeElapsed LearnRate TrainingLoss
_________ _____ ___________ _________ ____________
1 1 00:00:02 0.001 6.2466
500 6 00:00:24 0.001 0.042451
1000 12 00:00:38 0.001 0.073534
1500 17 00:00:52 0.001 0.038856
2000 23 00:01:04 0.001 0.041173
2500 29 00:01:16 0.001 0.021427
3000 34 00:01:28 0.001 0.044795
3500 40 00:01:39 0.001 0.030961
4000 45 00:01:50 0.001 0.028537
4450 50 00:02:01 0.001 0.017648
Training stopped: Max epochs completed
Définissez la propriété Network de l'objet mpnetSE2 sur le réseau entraîné.
mpnet.Network = net;
Effectuer un échantillonnage de l'espace d'état à l'aide de MPNet formé
Spécifiez une pose de départ et une pose objectif pour lesquelles calculer des échantillons d’état.
start= [2 2 0]; goal= [9 6 0];
Créez un objet d'espace d'état pour les limites d'état spécifiées.
stateSpace = stateSpaceSE2(stateBounds);
Configurez l'objet stateSamplerMPNet pour utiliser le MPNet formé pour l'échantillonnage de l'espace d'état. Transmettez l’environnement de la carte, l’état de départ et l’état objectif comme entrées à l’échantillonneur d’état. Définissez les limites du nombre maximum d’échantillons appris à prendre en compte à 50.
stateSamplerDL = stateSamplerMPNET(stateSpace,mpnet,Environment=map,StartState=start,GoalState=goal,MaxLearnedSamples=50);
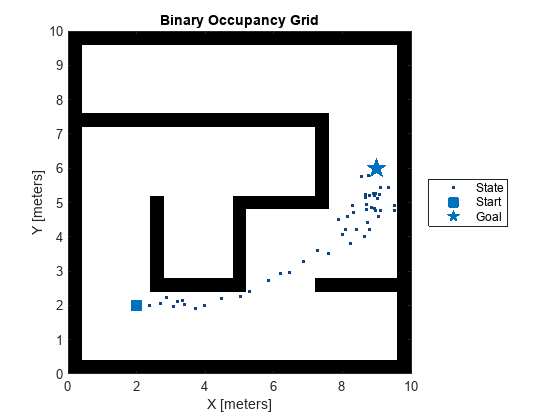
Générez 50 échantillons d’état entre le début et la pose d’objectif.
samples = sample(stateSamplerDL,50);
Tracez les échantillons d'état générés. Notez que les échantillons d'état générés sont concentrés entre les états de départ et d'objectif, et ne sont pas dispersés dans l'environnement de la carte. Vous pouvez réduire le temps de recherche et trouver rapidement les chemins optimaux en utilisant ces échantillons d’état comme bases pour la planification des mouvements.
figure show(map) hold on plot(samples(:,1),samples(:,2),plannerLineSpec.state{:}) plot(start(1),start(2),plannerLineSpec.start{:}) plot(goal(1),goal(2),plannerLineSpec.goal{:}) legend(Location="eastoutside")
Plus d'information
Vous pouvez également enregistrer le MPNet formé dans un fichier .mat pour une utilisation ultérieure. Enregistrez le réseau formé, les poids de perte et d'autres paramètres de réseau dans le fichier .mat . Pour plus d'informations sur l'utilisation d'un réseau pré-entraîné pour l'échantillonnage de l'espace d'état, voir Predict State Samples Using MPNet Trained on Single Environment.
networkInput = mpnet.NumInputs; networkOutput = mpnet.NumOutputs; networkLossWeights = mpnet.LossWeights; save("trainSingleMap.mat","net","map","networkInput","networkOutput","networkLossWeights");
Chargez un fichier de données contenant un MPNet pré-entraîné dans l'espace de travail MATLAB . Le MPNet a été formé sur des cartes de labyrinthe 2D générées aléatoirement avec des largeurs et des hauteurs de 10 mètres et une résolution de 2,5 cellules par mètre. Les cartes de labyrinthe contiennent une largeur de passage de 5 cellules de grille et une épaisseur de paroi de 1 cellule de grille.
data = load("mazeMapTrainedMPNET.mat")data = struct with fields:
encodingSize: [9 9]
lossWeights: [100 100 0]
mazeParams: {[5] [1] 'MapSize' [10 10] 'MapResolution' [2.5000]}
stateBounds: [3x2 double]
trainedNetwork: [1x1 dlnetwork]
Créez une carte de labyrinthe aléatoire à utiliser pour la planification des mouvements. La taille de la grille () doit être la même que celle des cartes utilisées pour la formation du MPNet.
rng(50,"twister")
map = mapMaze(5,1,MapSize=[20 20],MapResolution=1.25);Spécifiez la pose de départ et la pose d'objectif.
start = [2 8 0]; goal = [18 18 0];
Spécifiez les limites d'état et créez un objet d'espace d'état SE(2).
x = map.XWorldLimits; y = map.YWorldLimits; theta = [-pi pi]; stateBounds = [x; y; theta]; stateSpace = stateSpaceSE2(stateBounds);
Configurez l'objet mpnetSE2 pour utiliser le MPNet pré-entraîné pour prédire des échantillons d'état sur une carte aléatoire. Définissez les valeurs de propriété EncodingSize de l'objet mpnetSE2 sur les valeurs utilisées pour la formation du réseau.
mpnet = mpnetSE2(Network=data.trainedNetwork,StateBounds=stateBounds,EncodingSize=data.encodingSize);
Créez un échantillonneur d'état MPNet pour calculer les échantillons d'état. Spécifiez l'environnement de la carte ainsi que les poses de début et d'objectif comme entrées dans l'échantillonneur d'état.
mpnetSampler = stateSamplerMPNET(stateSpace,mpnet,Environment=map,StartState=start,GoalState=goal);
Générez 30 échantillons à partir de l'espace d'état d'entrée pour la planification de mouvement.
samples = sample(mpnetSampler,30);
Affichez la carte d'entrée et tracez les échantillons d'état calculés.
figure show(map) hold on plot(start(1),start(2),plannerLineSpec.start{:}) plot(goal(1),goal(2),plannerLineSpec.goal{:}) plot(samples(:,1),samples(:,2),plannerLineSpec.state{:}) legend(Location="bestoutside") hold off
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers These objects represent Start, Goal, State.](samplese2statespaceusingpretrainedmpnetexample_01_fr.png)
Références
[1] Prokudin, Sergey, Christoph Lassner, and Javier Romero. “Efficient Learning on Point Clouds with Basis Point Sets.” In 2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), 3072–81. Seoul, Korea (South): IEEE, 2019. https://doi.org/10.1109/ICCVW.2019.00370.
[2] Qureshi, Ahmed Hussain, Yinglong Miao, Anthony Simeonov, and Michael C. Yip. “Motion Planning Networks: Bridging the Gap Between Learning-Based and Classical Motion Planners.” IEEE Transactions on Robotics 37, no. 1 (February 2021): 48–66. https://doi.org/10.1109/TRO.2020.3006716.
Capacités étendues
Historique des versions
Introduit dans R2023b