Navigation Toolbox
Navigation Toolbox™ propose des algorithmes et des outils d'analyse pour la modélisation et l'étalonnage des capteurs, la planification de mouvement, la localisation et la cartographie simultanées (SLAM) ainsi que la navigation inertielle. La toolbox propose des modèles de capteurs et des algorithmes pour la localisation. Vous pouvez simuler et visualiser les données des capteurs IMU, GPS et d'encodeur de roue, et régler les filtres de fusion pour l'estimation de pose multisensorielle.
La toolbox contient des algorithmes échantillonnés personnalisables de recherche et de planification de trajectoires, ainsi que des métriques de validation et de comparaison de trajectoires. Vous pouvez créer des représentations cartographiques 2D et 3D, générer des cartes à l'aide d'algorithmes SLAM et visualiser et débugger de manière interactive la génération de cartes avec l'application de création de cartes SLAM.
Des exemples de référence sont proposés pour les applications dans les domaines de l'aéronautique, de la conduite automatisée, de la robotique et de l'électronique grand public. Vous pouvez tester vos algorithmes de navigation en les déployant directement sur le matériel (avec MATLAB® Coder™ ou Simulink® Coder).
Démarrer avec Navigation Toolbox
Apprendre les bases de Navigation Toolbox
Transformations de coordonnées et trajectoires
Quaternions, matrices de rotation, transformations, génération de trajectoires
Modèles de capteurs
Simulation et étalonnage des capteurs IMU, GPS et de distance
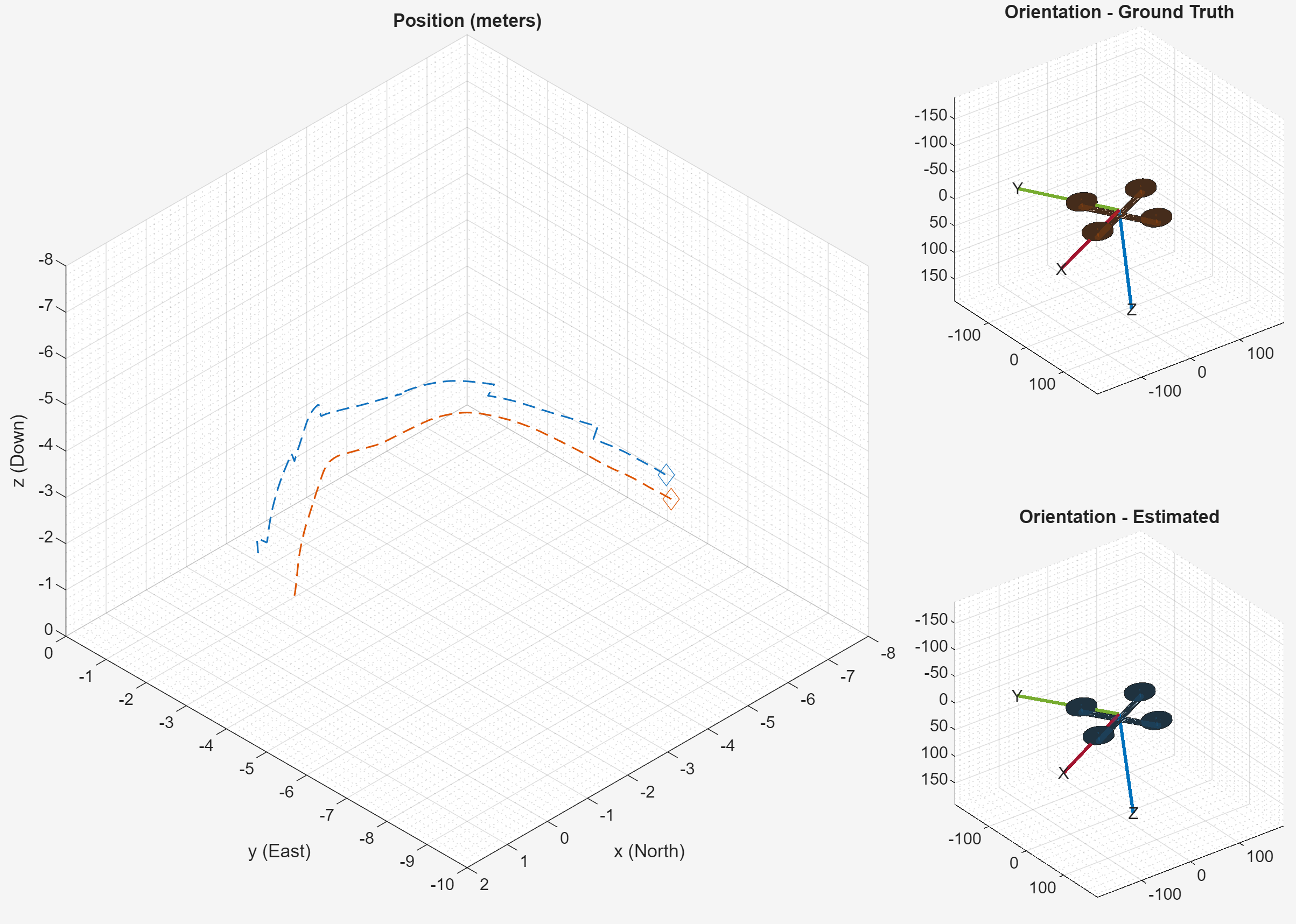
Fusion de capteurs inertiels
Navigation inertielle avec IMU et GPS, fusion de capteurs, réglage personnalisé des filtres
Positionnement GNSS
Estimation de position à l'aide de données GNSS
Algorithmes de localisation
Filtres particulaires, correspondance de scans, localisation Monte Carlo, graphes de pose, odométrie
Cartographie
Cartes d'occupation 2D et 3D, cartes égocentriques, lancer de rayons
SLAM
Localisation et cartographie simultanées 2D et 3D
Planification de mouvement
Planification de trajectoire globale et locale, suivi de trajectoire, évitement d'obstacles, métriques de trajectoire
Génération et déploiement de code
Générer du code C/C++ et des fonctions MEX pour l'accélération de l'algorithme