successors
Description
Exemples
Chargez les données navGraph pour les états et les liens.
load navGraphData.matVisualisez l'objet navGraph .
show(navGraphObj);
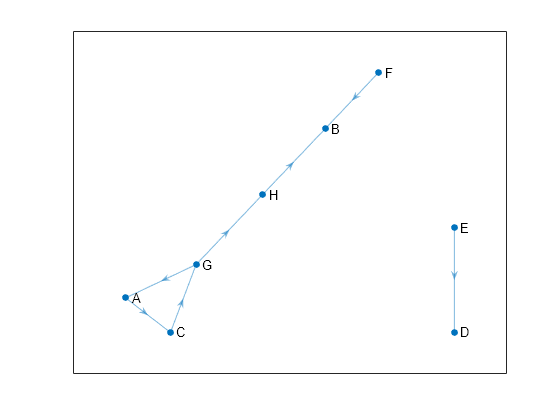
Recherchez des indices et des coûts d'État successifs en fonction du nom d'un État.
[succIDS,costs] = successors(navGraphObj,"G")succIDS = 2×1
1
8
costs = 2×1
38.7759
13.9383
Trouvez les vecteurs d'état des états successifs.
states = index2state(navGraphObj,succIDS)
states = 2×3
8.0000 2.0000 0.7218
8.0000 7.0000 0.6741
Arguments d'entrée
Arguments de sortie
Capacités étendues
Historique des versions
Introduit dans R2023a