append
Ajouter des états à la fin du chemin
Syntaxe
Description
Exemples
Créez un objet navPath basé sur plusieurs waypoints dans un espace Dubins.
dubinsSpace = stateSpaceDubins([0 25; 0 25; -pi pi])
dubinsSpace =
stateSpaceDubins with properties:
SE2 Properties
Name: 'SE2 Dubins'
StateBounds: [3x2 double]
NumStateVariables: 3
Dubins Vehicle Properties
MinTurningRadius: 1
pathobj = navPath(dubinsSpace)
pathobj =
navPath with properties:
StateSpace: [1x1 stateSpaceDubins]
States: [0x3 double]
NumStates: 0
MaxNumStates: Inf
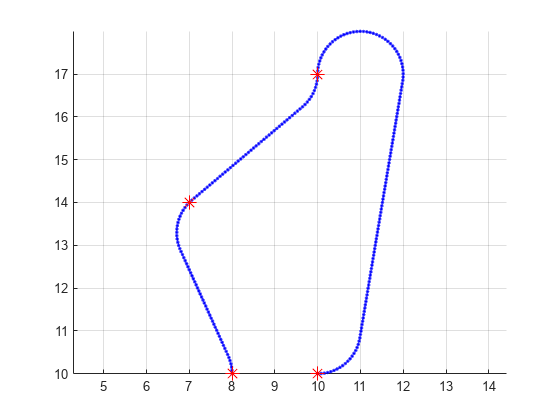
waypoints = [8 10 pi/2;
7 14 pi/4;
10 17 pi/2;
10 10 -pi];
append(pathobj,waypoints)Interpolez ce chemin pour qu'il contienne exactement 250 points.
interpolate(pathobj,250)
Visualisez le chemin interpolé et les waypoints d'origine.
figure grid on axis equal hold on plot(pathobj.States(:,1),pathobj.States(:,2),".b") plot(waypoints(:,1),waypoints(:,2),"*r","MarkerSize",10)
Calculez la longueur du chemin.
len = pathLength(pathobj);
disp("Path length = " + num2str(len))Path length = 19.4722
Chargez une carte d'occupation 3D d'un pâté de maisons dans l'espace de travail. Spécifiez le seuil pour considérer les cellules comme sans obstacle.
mapData = load("dMapCityBlock.mat");
omap = mapData.omap;
omap.FreeThreshold = 0.5;Gonflez la carte d'occupation pour ajouter une zone tampon pour un fonctionnement sûr autour des obstacles.
inflate(omap,1)
Créez un objet d'espace d'état SE(3) avec des limites pour les variables d'état.
ss = stateSpaceSE3([0 220;0 220;0 100;inf inf;inf inf;inf inf;inf inf]);
Créez un objet navPath basé sur plusieurs waypoints dans un espace d'état SE(3).
path = navPath(ss);
waypoints = [40 180 15 0.7 0.2 0 0.1;
55 120 20 0.6 0.2 0 0.1;
100 100 25 0.5 0.2 0 0.1;
130 90 30 0.4 0 0.1 0.6;
150 33 35 0.3 0 0.1 0.6];
append(path,waypoints)Interpolez ce chemin pour qu'il contienne exactement 250 points.
interpolate(path,250)
Visualisez le chemin interpolé et les waypoints d'origine.
show(omap) axis equal view([-10 55]) hold on % Start state scatter3(waypoints(1,1),waypoints(1,2),waypoints(1,3),"g","filled") % Goal state scatter3(waypoints(end,1),waypoints(end,2),waypoints(end,3),"r","filled") % Intermediate waypoints scatter3(waypoints(2:end-1,1),waypoints(2:end-1,2), ... waypoints(2:end-1,3),"y","filled") % Path plot3(path.States(:,1),path.States(:,2),path.States(:,3), ... "r-",LineWidth=2)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains 5 objects of type patch, scatter, line.](createnavpathbasedonmultiplewaypointsinse3statespaceexample_01_fr.png)
Calculez la longueur du chemin.
len = pathLength(path);
disp("Path length = " + num2str(len))Path length = 204.1797
Arguments d'entrée
Capacités étendues
Historique des versions
Introduit dans R2019b