navPathControl
Chemin représentant une trajectoire cinématique basée sur le contrôle
Depuis R2021b
Description
L'objet navPathControl stocke les chemins qui sont généralement créés par des planificateurs de chemin basés sur le contrôle, comme l'objet plannerControlRRT . L'objet navPathControl représente les chemins sous la forme d'une séquence d'états, de contrôles, de durées et de cibles. Cet objet associe chaque chemin à un propagateur d'état spécifique, qui propage les commandes de contrôle pour déterminer les états résultants.
Cet objet spécifie les états et les cibles dans le chemin dans l'espace d'état du propagateur. Les contrôles sont des sorties d'un contrôleur utilisées pour mettre à jour l'état de votre système pendant la propagation. Cet objet applique chaque contrôle pour une durée associée. Les commandes peuvent être des signaux de référence ou des entrées directes vers un intégrateur en fonction de la conception de votre système.
Création
Syntaxe
Description
pathObj = navPathControl(propagator)propagator spécifie le StatePropagator
pathObj = navPathControl(propagator,states,controls,targets,durations)
Propriétés
Fonctions d'objet
append | Ajouter des états à la fin du chemin |
interpolate | Chemin d'interpolation en fonction de la taille du pas du propagateur |
pathDuration | Durée totale écoulée du chemin de contrôle |
Exemples
Planifiez des trajectoires de contrôle pour un modèle cinématique de vélo avec l'objet mobileRobotPropagator . Spécifiez une carte pour l'environnement, définissez des limites d'état et définissez un emplacement de départ et un emplacement objectif. Planifiez un chemin à l'aide de l'algorithme RRT basé sur le contrôle, qui utilise un propagateur d'état pour planifier le mouvement et les commandes de contrôle requises.
Définir les paramètres d'état et de propagateur d'état
Chargez une matrice de carte ternaire et créez un objet occupancyMap . Créez le propagateur d'état à l'aide de la carte. Par défaut, le propagateur d'état utilise un modèle cinématique de vélo.
load('exampleMaps','ternaryMap') map = occupancyMap(ternaryMap,10); propagator = mobileRobotPropagator(Environment=map); % Bicycle model
Définissez les limites d'état sur l'espace d'état en fonction des limites du monde cartographique.
propagator.StateSpace.StateBounds(1:2,:) = ...
[map.XWorldLimits; map.YWorldLimits];Planifier le chemin
Créez le planificateur de chemin à partir du propagateur d'état.
planner = plannerControlRRT(propagator);
Spécifiez les états de départ et d’objectif.
start = [10 15 0]; goal = [40 30 0];
Planifiez un chemin entre les États. Pour des résultats reproductibles, réinitialisez le générateur de nombres aléatoires avant de planifier. La fonction plan génère un objet navPathControl , qui contient les états, les commandes de contrôle et les durées.
rng("default")
path = plan(planner,start,goal)path =
navPathControl with properties:
StatePropagator: [1x1 mobileRobotPropagator]
States: [192x3 double]
Controls: [191x2 double]
Durations: [191x1 double]
TargetStates: [191x3 double]
NumStates: 192
NumSegments: 191
Visualisez les résultats
Visualisez la carte et tracez les états du chemin.
show(map) hold on plot(start(1),start(2),"rx") plot(goal(1),goal(2),"go") plot(path.States(:,1),path.States(:,2),"b") hold off
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers](plankinodynamicpathwithcontrolsformobilerobotexample_01_fr.png)
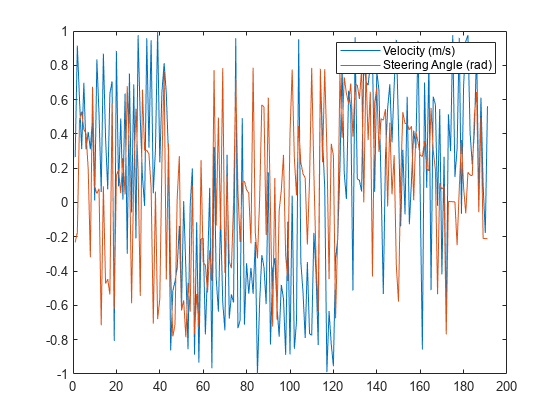
Affichez les entrées de contrôle [v psi] de la vitesse d'avancement et de l'angle de braquage.
plot(path.Controls) ylim([-1 1]) legend(["Velocity (m/s)","Steering Angle (rad)"])
Définir les paramètres d'état et de propagateur d'état
Chargez une matrice de carte ternaire et créez un objet occupancyMap .
load("exampleMaps","ternaryMap") map = occupancyMap(ternaryMap,10);
Créez un propagateur d'état pour un modèle cinématique de vélo à l'aide de la carte.
propagator = mobileRobotPropagator(Environment=map);
Définissez les limites d'état sur l'espace d'état en fonction des limites du monde cartographique.
propagator.StateSpace.StateBounds(1:2,:) = [map.XWorldLimits;
map.YWorldLimits];Planifier le chemin
Créez le planificateur de chemin à partir du propagateur d'état.
planner = plannerControlRRT(propagator);
Spécifiez les états de départ et d’objectif.
start = [10 15 0]; goal = [40 30 0];
Planifiez un chemin entre les États. Pour des résultats reproductibles, réinitialisez le générateur de nombres aléatoires avant de planifier.
rng("default")
path = plan(planner,start,goal);Vérifiez la durée totale écoulée du chemin de contrôle.
pathDuration(path)
ans = 102.4000
Interpolez le chemin vers la taille du pas de contrôle du propagateur.
interpolate(path)
Visualisez le chemin.
figure show(map) hold on plot(start(1),start(2),"rx") plot(goal(1),goal(2),"go") plot(path.States(:,1),path.States(:,2),"b") hold off
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers](combinetwokinodynamicpathswithcontrolsformobilerobotexample_01_fr.png)
Planifier le chemin de retour
Planifiez un deuxième chemin depuis la fin de l'emplacement du chemin précédent jusqu'au début.
path2 = plan(planner,path.States(end,:),start);
Vérifiez la durée totale écoulée du deuxième chemin.
pathDuration(path2)
ans = 100.3000
Visualisez le chemin.
figure show(map) hold on plot(start(1),start(2),"rx") plot(goal(1),goal(2),"go") plot(path2.States(:,1),path2.States(:,2),"m") hold off
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers](combinetwokinodynamicpathswithcontrolsformobilerobotexample_02_fr.png)
Combiner les chemins
Extrayez la séquence de mouvements du deuxième chemin.
states = path2.States(2:end,:); controls = path2.Controls; targets = path2.TargetStates; durations = path2.Durations;
Ajoutez cette séquence à la fin du premier chemin.
append(path,states,controls,targets,durations)
Interpolez les nouveaux segments dans le chemin d'origine.
interpolate(path)
Vérifiez la durée totale écoulée du chemin final.
pathDuration(path)
ans = 102.4000
Visualisez le chemin.
figure show(map) hold on plot(start(1),start(2),"rx") plot(goal(1),goal(2),"go") plot(path.States(:,1),path.States(:,2),"b") hold off
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers](combinetwokinodynamicpathswithcontrolsformobilerobotexample_03_fr.png)
Historique des versions
Introduit dans R2021b