reedsSheppPathSegment
Segment de chemin Reeds-Shepp reliant deux poses
Description
L'objet reedSheppPathSegment contient des informations sur un segment de chemin Reeds-Shepp pour se connecter entre les poses. Un segment de chemin Reeds-Shepp relie deux poses sous la forme d'une séquence de cinq types de mouvements. Les options de mouvement sont :
Droit
Virage à gauche avec direction maximale
Virage à droite avec direction maximale
Pas de mouvement
Création
Pour générer un objet reedSheppPathSegment , utilisez la fonction connect avec un objet reedsSheppConnection :
reedsPathSegObj = connect(connectionObj,start,goal) connecte les poses de départ et d'objectif à l'aide de l'objet de type de connexion spécifié.
Pour définir spécifiquement un segment de chemin :
reedsPathSegObj = reedsSheppPathSegment(connectionObj,start,goal,motionLengths,motionTypes) spécifie le type de connexion Reeds-Shepp, les poses de départ et d'objectif, ainsi que les longueurs et types de mouvement correspondants. Ces valeurs sont définies sur les propriétés correspondantes dans l'objet.
Propriétés
Fonctions d'objet
interpolate | Interpoler les poses le long du segment de chemin |
show | Visualize path segment |
Exemples
Créez un objet reedsSheppConnection .
reedsConnObj = reedsSheppConnection;
Définissez les poses de début et d'objectif en tant que vecteurs [x y theta] .
startPose = [0 0 0]; goalPose = [1 1 pi];
Calculez un segment de chemin valide pour connecter les poses.
[pathSegObj,pathCosts] = connect(reedsConnObj,startPose,goalPose);
Afficher le chemin généré.
show(pathSegObj{1})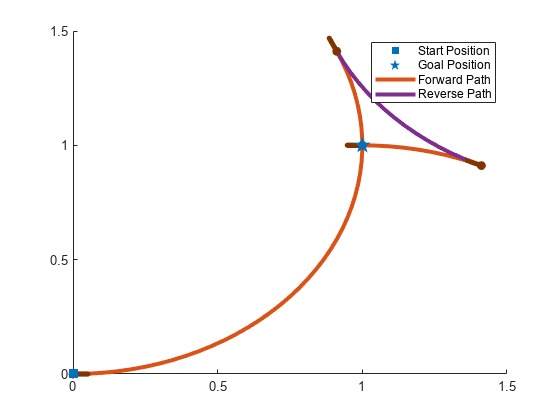
Références
[1] Reeds, J. A., and L. A. Shepp. "Optimal Paths for a Car That Goes Both Forwards and Backwards." Pacific Journal of Mathematics. Vol. 145, Number 2, 1990, pp. 367–393.
Capacités étendues
Historique des versions
Introduit dans R2019b