connect
Connect pose pour un type de connexion donné
Syntaxe
Description
[ connecte les poses de départ et d'objectif à l'aide de l'objet pathSegments,pathCosts] = connect(connectionObj,start,goal)dubinsConnection spécifié. L'objet segment de chemin ayant le coût le plus bas est renvoyé.
[ renvoie tous les segments de chemin possibles sous forme de cell array avec leurs coûts associés.pathSegments,pathCosts] = connect(connectionObj,start,goal,'PathSegments','all')
Exemples
Créez un objet dubinsConnection .
dubConnObj = dubinsConnection;
Définissez les poses de début et d'objectif en tant que vecteurs [x y theta] .
startPose = [0 0 0]; goalPose = [1 1 pi];
Calculez un segment de chemin valide pour connecter les poses.
[pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose);
Afficher le chemin généré.
show(pathSegObj{1})
Créez un objet reedsSheppConnection .
reedsConnObj = reedsSheppConnection;
Définissez les poses de début et d'objectif en tant que vecteurs [x y theta] .
startPose = [0 0 0]; goalPose = [1 1 pi];
Calculez un segment de chemin valide pour connecter les poses.
[pathSegObj,pathCosts] = connect(reedsConnObj,startPose,goalPose);
Afficher le chemin généré.
show(pathSegObj{1})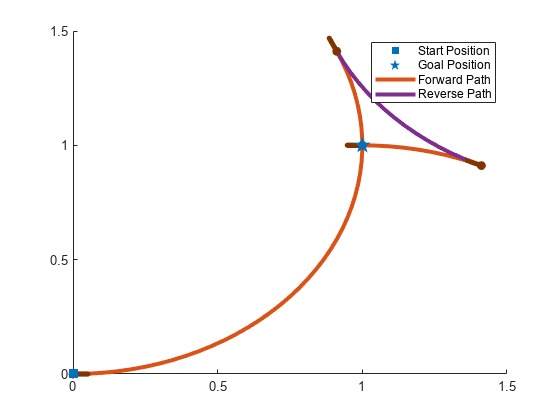
Arguments d'entrée
Arguments de sortie
Capacités étendues
Historique des versions
Introduit dans R2019b