reedsSheppConnection
Type de connexion du chemin Reeds-Shepp
Description
L'objet reedSheppConnection contient des informations permettant de calculer un objet reedsSheppPathSegment pour se connecter entre les poses. Un segment de chemin Reeds-Shepp relie deux poses sous la forme d'une séquence de cinq mouvements. Les options de mouvement sont :
Droit
Virage à gauche avec direction maximale
Virage à droite avec direction maximale
Pas de mouvement
Un segment de chemin Reeds-Shepp prend en charge à la fois le mouvement vers l'avant et vers l'arrière.
Utilisez cet objet de connexion pour définir les paramètres d'un modèle de mouvement de véhicule, notamment le rayon de braquage minimum et les options pour les types de trajectoire. Pour générer un segment de chemin entre les poses à l'aide de ce type de connexion, appelez la fonction connect .
Création
Description
reedsConnObj = reedsSheppConnection
reedsConnObj = reedsSheppConnection(Name,Value)
Propriétés
Fonctions d'objet
connect | Connect pose pour un type de connexion donné |
Exemples
Créez un objet reedsSheppConnection .
reedsConnObj = reedsSheppConnection;
Définissez les poses de début et d'objectif en tant que vecteurs [x y theta] .
startPose = [0 0 0]; goalPose = [1 1 pi];
Calculez un segment de chemin valide pour connecter les poses.
[pathSegObj,pathCosts] = connect(reedsConnObj,startPose,goalPose);
Afficher le chemin généré.
show(pathSegObj{1})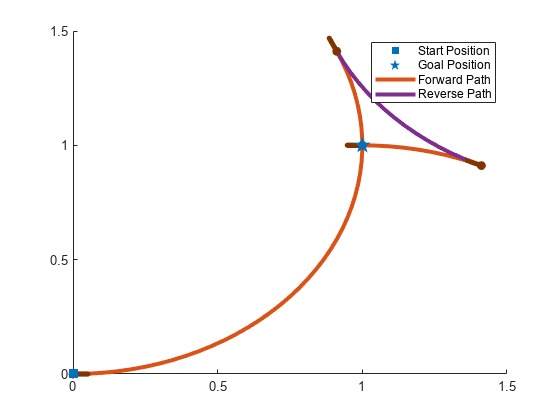
Créez un objet reedsSheppConnection .
reedsConnObj = reedsSheppConnection;
Définissez les poses de début et d'objectif en tant que vecteurs [x y theta] .
startPose = [0 0 0]; goalPose = [1 1 pi];
Calculez un segment de chemin valide pour connecter les poses.
[pathSegObj,pathCosts] = connect(reedsConnObj,startPose,goalPose);
Afficher le chemin généré. Notez la direction des virages.
show(pathSegObj{1})
pathSegObj{1}.MotionTypesans = 1x5 cell
{'L'} {'R'} {'L'} {'N'} {'N'}
pathSegObj{1}.MotionDirectionsans = 1×5
1 -1 1 1 1
Désactivez cette séquence de mouvements spécifique dans un nouvel objet de connexion. Réduisez le MinTurningRadius si le robot est plus maniable. Augmentez le coût inverse pour réduire la probabilité d’utilisation de directions inverses. Connectez à nouveau les poses pour obtenir un chemin différent.
reedsConnObj = reedsSheppConnection('DisabledPathTypes',{'LpRnLp'}); reedsConnObj.MinTurningRadius = 0.5; reedsConnObj.ReverseCost = 5; [pathSegObj,pathCosts] = connect(reedsConnObj,startPose,goalPose); pathSegObj{1}.MotionTypes
ans = 1x5 cell
{'L'} {'S'} {'L'} {'N'} {'N'}
show(pathSegObj{1})
xlim([0 1.5])
ylim([0 1.5])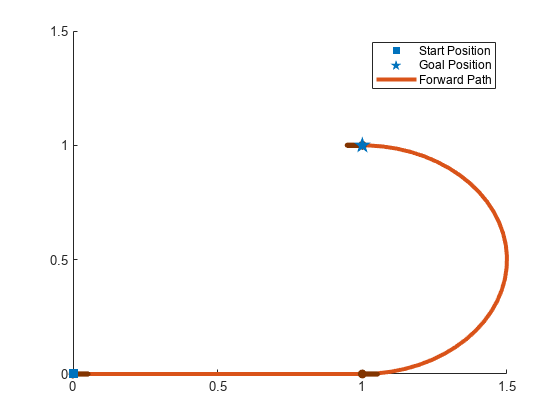
Capacités étendues
Historique des versions
Introduit dans R2019b