mvdrweights
Minimum variance distortionless response (MVDR) beamformer weights
Description
wt = mvdrweights(pos,ang,cov)pos argument
specifies the sensor positions of the array. The ang argument
specifies the azimuth and elevation angles of the desired response
directions. cov is the sensor spatial covariance
matrix between sensor elements. The output argument, wt,
is a matrix contains the beamformer weights for each sensor and each
direction. Each column of wt contains the weights
for the corresponding direction specified in ang.
All elements in the sensor array are assumed to be isotropic.
Examples
Construct a 10-element, half-wavelength-spaced line array. Choose two arrival directions of interest - one at 30° azimuth and the other at 45° azimuth. Assume both directions are at 0° elevation. Compute the MVDR beamformer weights for each direction. Specify a sensor spatial covariance matrix that contains signals arriving from -60° and 60° and noise at -10 dB.
Set up the array and sensor spatial covariance matrix.
N = 10; d = 0.5; elementPos = (0:N-1)*d; Sn = sensorcov(elementPos,[-60 60],db2pow(-10));
Solve for the MVDR beamformer weights.
w = mvdrweights(elementPos,[30 45],Sn);
Plot the two MVDR array patterns.
plotangl = -90:90; vv = steervec(elementPos,plotangl); plot(plotangl,mag2db(abs(w'*vv))) grid on xlabel('Azimuth Angle (degrees)'); ylabel('Normalized Power (dB)'); legend('30 deg','45 deg'); title('MVDR Array Pattern')
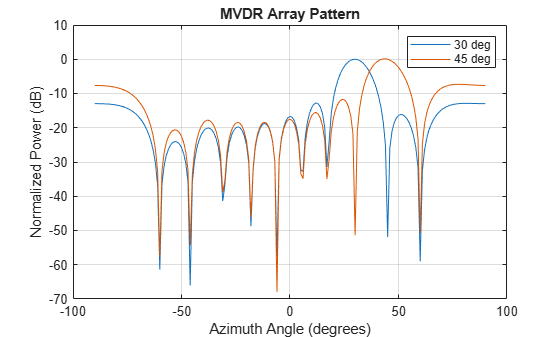
The figure shows plots for each beamformer direction. One plot has the expected maximum gain at 30 degrees and the other at 45 degrees. The nulls at -60 and 60 degrees arise from the fundamental property of the MVDR beamformer of suppressing power in all directions except for the arrival direction.
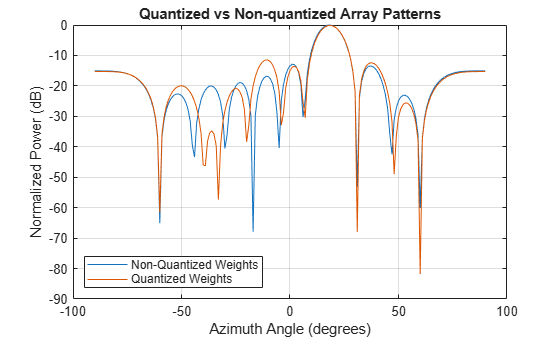
Construct a 10-element, half-wavelength-spaced line array. Choose the arrival direction of interest to be 18.5° azimuth and 10° elevation. Compute the MVDR beamformer weights and then compute the weights for 3-bit quantization. Specify a sensor spatial covariance matrix that contains signals arriving from -60° and 60° and noise at -10 dB.
Set up the array and the sensor spatial covariance matrix.
N = 10; d = 0.5; elementPos = (0:N-1)*d; SN = sensorcov(elementPos,[-60 60],db2pow(-10));
Solve for the MVDR beamformer weights with and without quantization.
w = mvdrweights(elementPos,[18.5;10],SN); wq = mvdrweights(elementPos,[18.5;10],SN,3);
Plot both MVDR array patterns.
plotangl = -90:90; vv = steervec(elementPos,plotangl); plot(plotangl,mag2db(abs(w'*vv))) hold on plot(plotangl,mag2db(abs(wq'*vv))) grid on xlabel('Azimuth Angle (degrees)') ylabel('Normalized Power (dB)') legend('Non-Quantized Weights','Quantized Weights','Location','SouthWest'); title('Quantized vs Non-quantized Array Patterns') hold off
Input Arguments
Output Arguments
More About
References
[1] Van Trees, H.L. Optimum Array Processing. New York, NY: Wiley-Interscience, 2002.
[2] Johnson, Don H. and D. Dudgeon. Array Signal Processing. Englewood Cliffs, NJ: Prentice Hall, 1993.
[3] Van Veen, B.D. and K. M. Buckley. “Beamforming: A versatile approach to spatial filtering”. IEEE ASSP Magazine, Vol. 5 No. 2 pp. 4–24.
Extended Capabilities
Version History
Introduced in R2013a
See Also
steervec | cbfweights | lcmvweights | sensorcov | phased.MVDRBeamformer