rlContinuousGaussianActor
Stochastic Gaussian actor with a continuous action space for reinforcement learning agents
Since R2022a
Description
This object implements a function approximator to be used as a stochastic actor
within a reinforcement learning agent with a continuous action space. A continuous Gaussian
actor takes an environment observation as input and returns as output a random action sampled
from a parametrized Gaussian probability distribution, thereby implementing a parametrized
stochastic policy. After you create an rlContinuousGaussianActor object, use
it to create a suitable agent, such as an rlACAgent or rlPGAgent agent. For
more information on creating actors and critics, see Create Policies and Value Functions.
Creation
Syntax
Description
actor = rlContinuousGaussianActor(net,observationInfo,actionInfo,ActionMeanOutputNames=meanOutLyrName,ActionStandardDeviationOutputNames=stdOutLyrName)net as approximation model. Here, net
must have two differently named output layers, each with as many elements as the number
of dimensions of the action space, as specified in actionInfo. The
two output layers must return the mean and standard deviation of each component of the
action, respectively. The actor uses the output from these layers, according to the
names specified in the strings meanOutLyrName and
netStdActName, to represent the Gaussian probability distribution
from which the action is sampled. This syntax sets the
ObservationInfo and ActionInfo properties of
actor to the input arguments observationInfo
and actionInfo, respectively.
Note
actor does not enforce constraints set by the action
specification. When using this actor anywhere else than in a SAC agent, you must
enforce action space constraints within the environment.
actor = rlContinuousGaussianActor(___,Name=Value)UseDevice property using one or more name-value arguments.
Specifying the input layer names allows you explicitly associate the layers of your
network approximator with specific environment channels. For all types of approximators,
you can specify the device where computations for actor are
executed, for example UseDevice="gpu".
Input Arguments
Properties
Object Functions
rlACAgent | Actor-critic (AC) reinforcement learning agent |
rlPGAgent | Policy gradient (PG) reinforcement learning agent |
rlPPOAgent | Proximal policy optimization (PPO) reinforcement learning agent |
rlSACAgent | Soft actor-critic (SAC) reinforcement learning agent |
getAction | Obtain action from agent, actor, or policy object given environment observations |
evaluate | Evaluate function approximator object given observation (or observation-action) input data |
gradient | (Not recommended) Evaluate gradient of function approximator object given observation and action input data |
accelerate | (Not recommended) Option to accelerate computation of gradient for approximator object based on neural network |
getLearnableParameters | Obtain learnable parameter values from agent, function approximator, or policy object |
setLearnableParameters | Set learnable parameter values of agent, function approximator, or policy object |
setModel | Set approximation model in function approximator object |
getModel | Get approximation model from function approximator object |
Examples
Create Continuous Gaussian Actor
Create an observation specification object (or alternatively use getObservationInfo to extract the specification object from an environment). For this example, define the observation space as a continuous six-dimensional space, so that there is a single observation channel that carries a column vector containing five doubles.
obsInfo = rlNumericSpec([5 1]);
Create an action specification object (or alternatively use getActionInfo to extract the specification object from an environment). For this example, define the action space as a continuous three-dimensional space, so that the action channel carries a column vector containing three doubles, each between -10 and 10.
actInfo = rlNumericSpec([3 1], ... LowerLimit=-10, ... UpperLimit=10);
A continuous Gaussian actor implements a parametrized stochastic policy for a continuous action space. This actor takes an observation as input and returns as output a random action sampled from a Gaussian probability distribution.
To approximate the mean values and standard deviations of the Gaussian distribution, you must use a neural network with two output layers, each having as many elements as the dimension of the action space. One output layer must return a vector containing the mean values for each action dimension. The other must return a vector containing the standard deviation for each action dimension.
Note that standard deviations must be nonnegative and mean values must fall within the range of the action. Therefore the output layer that returns the standard deviations must be a softplus or ReLU layer, to enforce nonnegativity, while the output layer that returns the mean values must be a scaling layer, to scale the mean values to the output range. However, do not add a tanhLayer as the last nonlinear layer in the mean output path if you are going to use the actor within a SAC agent. For more information see Soft Actor-Critic (SAC) Agents.
For this example the environment has only one observation channel and therefore the network has only one input layer. Note that prod(obsInfo.Dimension) and prod(actInfo.Dimension) return the number of dimensions of the observation and action spaces, respectively, regardless of whether they are arranged as row vectors, column vectors, or matrices.
Define each network path as an array of layer objects, and assign names to the input and output layers of each path. These names allow you to connect the paths and then later explicitly associate the network input and output layers with the appropriate environment channel.
% Input path layers inPath = [ featureInputLayer( ... prod(obsInfo.Dimension), ... Name="netOin") fullyConnectedLayer( ... prod(actInfo.Dimension), ... Name="infc") ]; % Path layers for mean value % Using scalingLayer to scale range from (-1,1) to (-10,10) meanPath = [ tanhLayer(Name="tanhMean"); fullyConnectedLayer(prod(actInfo.Dimension)); scalingLayer(Name="scale", ... Scale=actInfo.UpperLimit) ]; % Path layers for standard deviations % Using softplus layer to make them non negative sdevPath = [ tanhLayer(Name="tanhStdv"); fullyConnectedLayer(prod(actInfo.Dimension)); softplusLayer(Name="splus") ];
Assemble dlnetwork object.
net = dlnetwork(); net = addLayers(net,inPath); net = addLayers(net,meanPath); net = addLayers(net,sdevPath);
Connect layers.
net = connectLayers(net,"infc","tanhMean/in"); net = connectLayers(net,"infc","tanhStdv/in");
Plot the network.
plot(net)
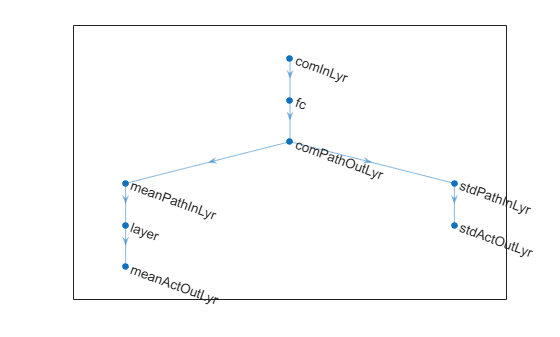
Initialize network and display the number of learnable parameters (weights).
net = initialize(net); summary(net)
Initialized: true
Number of learnables: 42
Inputs:
1 'netOin' 5 features
Create the actor with rlContinuousGaussianActor, using the network, the observation and action specification objects, and the names of the network input and output layers.
actor = rlContinuousGaussianActor(net, obsInfo, actInfo, ... ActionMeanOutputNames="scale",... ActionStandardDeviationOutputNames="splus",... ObservationInputNames="netOin");
To check your actor, use getAction to return an action from a random observation vector, using the current network weights. Each of the three elements of the action vector is a random sample from the Gaussian distribution with mean and standard deviation calculated, as a function of the current observation, by the neural network.
act = getAction(actor,{rand(obsInfo.Dimension)});
act{1}ans = 3x1 single column vector
-12.0285
1.7628
10.8733
To return the Gaussian distribution of the action, given an observation, use evaluate.
dist = evaluate(actor,{rand(obsInfo.Dimension)});Display the vector of mean values.
dist{1}ans = 3x1 single column vector
-5.6127
3.9449
9.6213
Display the vector of standard deviations.
dist{2}ans = 3x1 single column vector
0.8516
0.8366
0.7004
You can now use the actor (along with a critic) to create an agent for the environment described by the given specification objects. Examples of agents that can work with continuous action and observation spaces, and use a continuous Gaussian actor, are rlACAgent, rlPGAgent, rlSACAgent, rlPPOAgent, and rlTRPOAgent.
For more information on creating approximator objects such as actors and critics, see Create Policies and Value Functions.
Version History
Introduced in R2022a
See Also
Functions
Objects
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)