Manipulator Planning
Manipulator motion planning involves planning paths in high-dimensional space
based on the degree-of-freedom (DOF) of your robot and the kinematic constraints
of the robot model. Kinematic constraints for the robot model are specified as a
rigidBodyTree object. Use
manipulatorRRT to plan paths in the joint space using the rapidly
exploring random tree (RRT) algorithm. Use manipulatorCHOMP to plan and optimize smooth, collision-free
trajectories using covariant Hamiltonian optimization for motion planning
(CHOMP) algorithm.
Functions
Topics
Using Motion Planners for Pick-and-Place
- Pick-and-Place Workflow Using RRT for Manipulators
Tune manipulator RRT for path planning with a Panda robot model to perform collision-free pick-and-place movements. - Pick-and-Place Workflow Using RRT Planner and Stateflow for MATLAB
Set up pick-and-place workflow for Kinova® Gen3 manipulator using RRT planning in MATLAB®. - Pick-and-Place Workflow in Gazebo Using Point-Cloud Processing and RRT Path Planning
Set up pick-and-place workflow for Kinova Gen3 manipulator using point-cloud processing and RRT path planning. - Plan Paths with End-Effector Constraints Using State Spaces for Manipulators
Plan a manipulator robot path using sampling-based planners like the rapidly-exploring random trees (RRT) algorithm.
Featured Examples

Detect and Harvest Fruit Using UR10 Manipulator in Gazebo
Set up UR10 manipulator and simulate it in Gazebo simulator to perform fruit pick-and-place application.

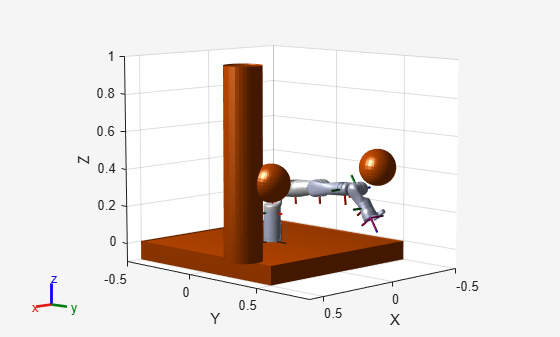
Train Deep-Learning-Based CHOMP Optimizer for Motion Planning
Train a dlCHOMP optimizer for motion planning in a complex spherical obstacle environment.

Plan Path of Robotic Arm Mounted on Quadrotor
Plan geometric paths free of collisions for floating-base systems such as a quadrotor.
Plan Path for Manipulator in Simulink with Robotics System Toolbox
Simulate manipulator path planning in Simulink® with code generation for autonomy functions from MATLAB.
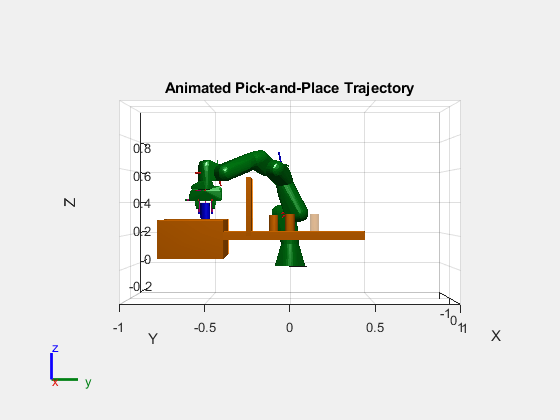
Pick-And-Place Workflow Using CHOMP for Manipulators
Use CHOMP to plan smooth and collision-free trajectories for a pick-and-place workflow.

Motion Planning for Backhoe Using RRT
Plan an obstacle-free path for a backhoe using RRT and simulate the motion in Simscape™ Multibody™.