centerOfMass
Center of mass position and Jacobian
Syntax
Description
com = centerOfMass(robot,configuration)
[ also
returns the center of mass Jacobian, which relates the center of mass
velocity to the joint velocities.com,comJac]
= centerOfMass(robot,configuration)
Examples
Load a KUKA LBR iiwa robot model from the Robotics System Toolbox™ loadrobot. This is specified as a rigidBodyTree object.
lbr = loadrobot("kukaIiwa14")lbr =
rigidBodyTree with properties:
NumBodies: 10
Bodies: {[1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody] [1×1 rigidBody]}
Base: [1×1 rigidBody]
BodyNames: {'iiwa_link_0' 'iiwa_link_1' 'iiwa_link_2' 'iiwa_link_3' 'iiwa_link_4' 'iiwa_link_5' 'iiwa_link_6' 'iiwa_link_7' 'iiwa_link_ee' 'iiwa_link_ee_kuka'}
BaseName: 'world'
Gravity: [0 0 0]
DataFormat: 'struct'
FrameNames: {'world' 'iiwa_link_0' 'iiwa_link_1' 'iiwa_link_2' 'iiwa_link_3' 'iiwa_link_4' 'iiwa_link_5' 'iiwa_link_6' 'iiwa_link_7' 'iiwa_link_ee' 'iiwa_link_ee_kuka'}
Set the data format to "row". For all dynamics calculations, the data format must be either "row" or "column".
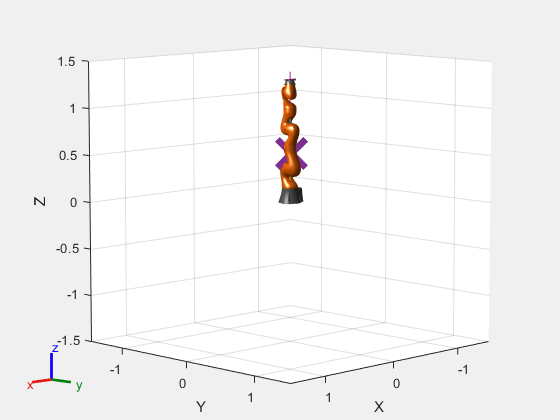
lbr.DataFormat = "row";Compute the center of mass position and Jacobian at the home configuration of the robot.
[comLocation,comJac] = centerOfMass(lbr); show(lbr); hold on plot3(comLocation(1),comLocation(2),comLocation(3),Marker="x",MarkerSize=30,LineWidth=5); hold off
Input Arguments
Output Arguments
References
[1] Featherstone, Roy. Rigid Body Dynamics Algorithms. Springer US, 2008. DOI.org (Crossref), doi:10.1007/978-1-4899-7560-7.