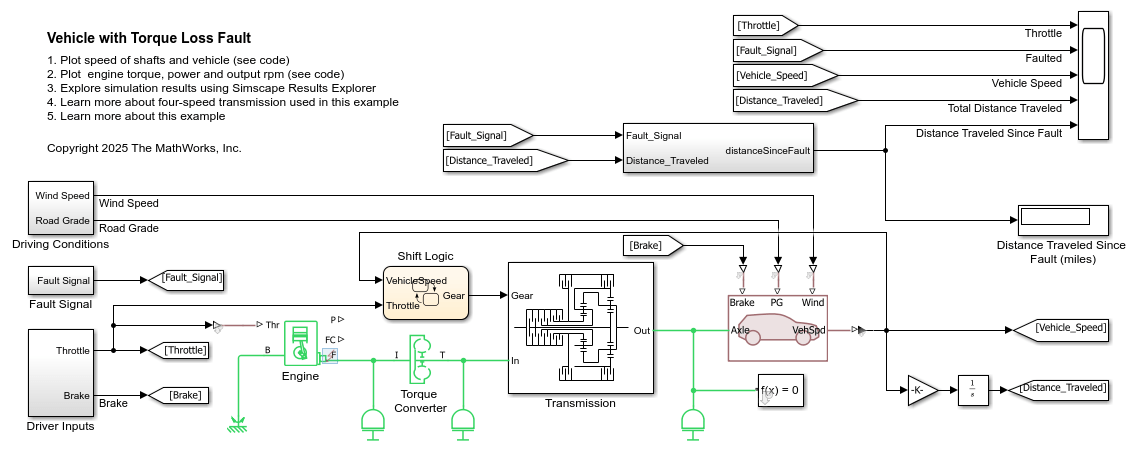
Vehicle with Torque Loss Fault
This example shows effect of engine torque loss on the vehicle speed, clutch states, and engine variables including torque, rotational speed and power. This example includes a model of vehicle with four-speed transmission that experiences engine fault while in motion. The vehicle experiences loss of torque at specific time and the example models the vehicle response under the faulted condition. The engine loses torque while in faulted state. As a result of loss of torque, the engine stops producing power. Even though the driver continues to throttle, the engine does not produce any power after the fault occurs. The model simulates the distance traveled by vehicle from the moment the torque loss occurs until the vehicle comes to a complete stop.
The vehicle is equipped with a four-speed transmission adapted from Vehicle with Four-Wheel Drive. The torque loss fault is implemented by using the fault injection capability of the Generic Engine block used in the model.
Model
The Generic Engine block computes torque as a function of engine speed and throttle input. The block computes the engine power as a product of torque and speed. When the torque loss fault occurs, the torque value becomes zero irrespective of the engine speed and throttle input. The loss of torque results in a loss of power.
The Torque loss fault in the Generic Engine block has the Trigger type parameter set to Conditional. A signal named "Fault_Signal" is used to trigger the fault. At the start of the simulation, "Fault_Signal" is zero, and it switches to one at a specific time during the simulation. This change from zero to one triggers the fault. The "Fault_Signal" comes from a Step block located in the Fault Signal subsystem, which is configured to step at 70 seconds. The step rise causes the conditional fault to trigger.
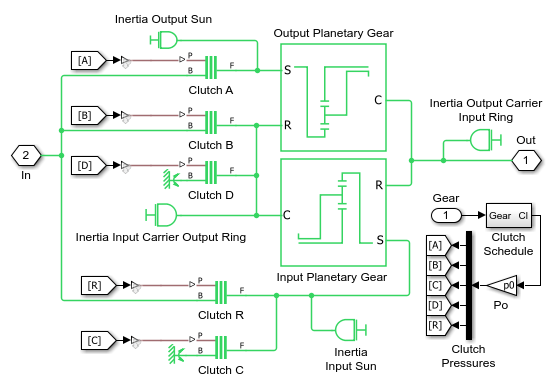
Transmission Subsystem
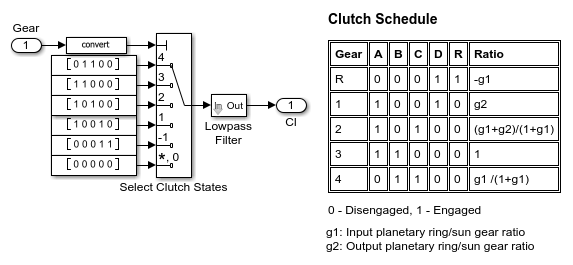
Clutch Schedule Subsystem
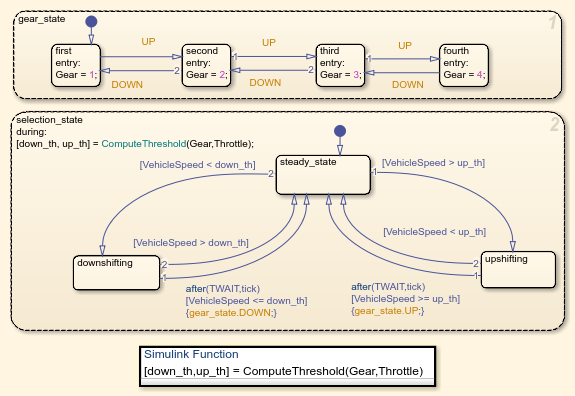
Shift Logic Subsystem
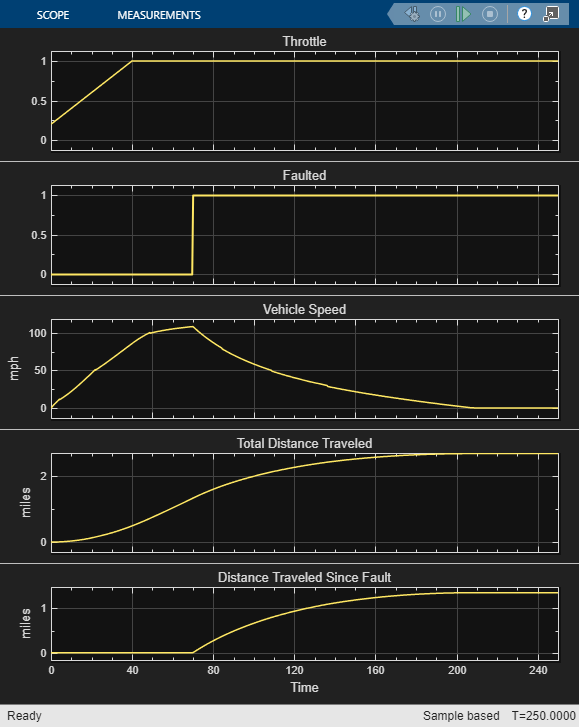
Simulation Results from Scope
The figure shows throttle input, fault state, vehicle speed, total distance traveled by the vehicle, and distance traveled since the fault occurred. Total distance traveled is measured from the start to the end of the simulation. Distance traveled since fault is the distance the vehicle covers after losing power. Simulating the distance traveled after the fault triggers helps determine whether the driver can move the vehicle to a safe location.
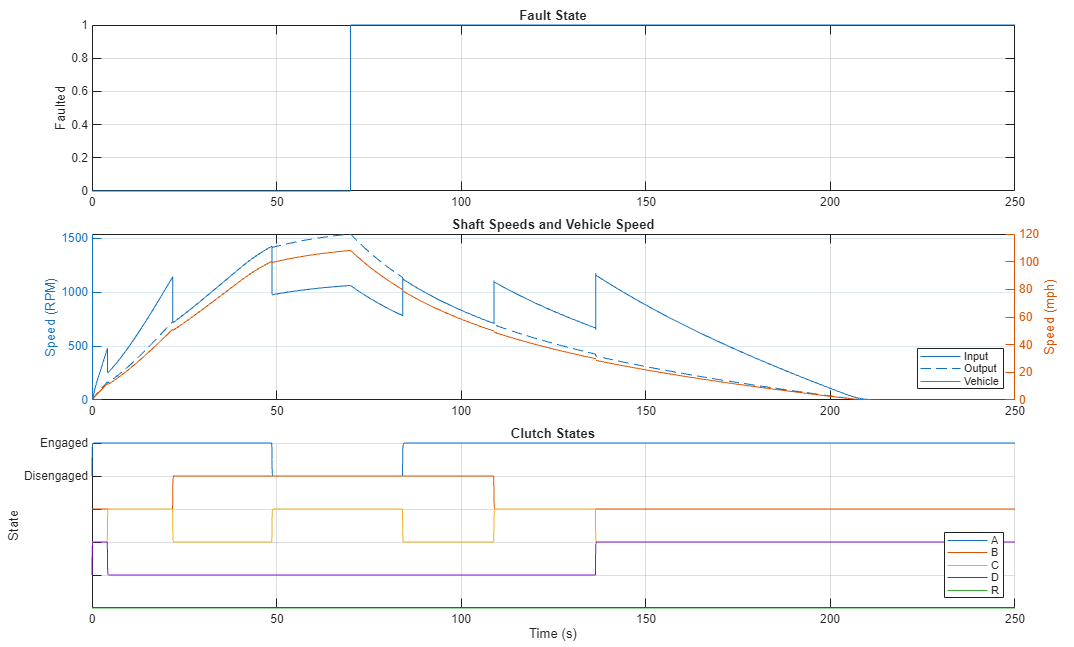
Simulation Results from Simscape Logging
The figure shows the input and output shaft speeds of the transmission as well as the vehicle speed. The clutch states are also plotted (engaged or disengaged), indicating the selected gear of the transmission. The gear shifting logic is not affected by the fault state, as it depends only on vehicle speed and input throttle. However, the vehicle speed and shaft speeds begin to decrease once the fault occurs.
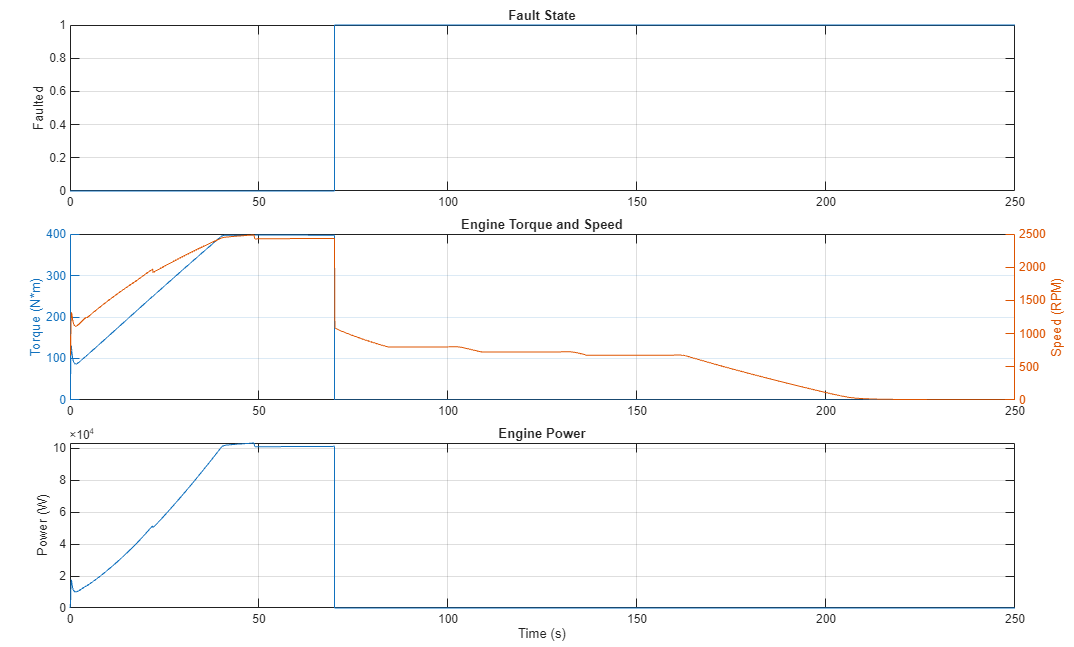
The figure shows engine variables: torque, rotational speed and power. When the fault occurs, the torque produced drops to zero. As a result, the engine power also drops to zero.