isminphase
Determine whether filter is minimum phase
Syntax
Description
flag = isminphase(B,A,"ctf")1 if the filter specified as Cascaded Transfer Functions (CTF) with numerator coefficients B and denominator coefficients
A is minimum phase. (since R2024b)
flag = isminphase(d)1 if the digital filter d is minimum phase.
Use designfilt to generate d
based on frequency-response specifications.
Examples
Design a sixth-order lowpass Butterworth IIR filter using second order sections. Specify a normalized 3 dB frequency of 0.15. Check if the filter is minimum phase.
[z,p,k] = butter(6,0.15); SOS = zp2sos(z,p,k); min_flag = isminphase(SOS)
min_flag = logical
1
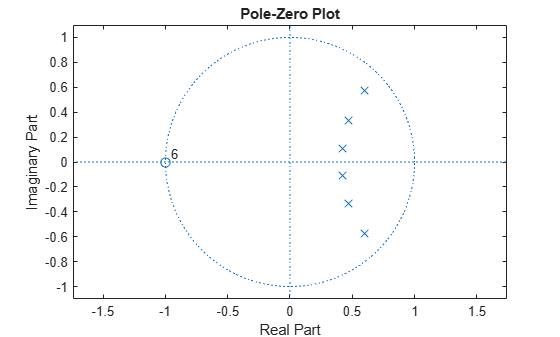
Redesign the filter using designfilt. Check that the zeros and poles of the transfer function are on or within the unit circle.
d = designfilt("lowpassiir", ... DesignMethod="butter",FilterOrder=6, ... HalfPowerFrequency=0.25); d_flag = isminphase(d)
d_flag = logical
1
zplane(d)
Given a filter defined with a set of single-precision numerator and denominator coefficients, check if it is minimum phase for different tolerance values.
b = single([1 1.00001]); a = single([1 0.45]); min_flag1 = isminphase(b,a)
min_flag1 = logical
0
min_flag2 = isminphase(b,a,1e-3)
min_flag2 = logical
1
Since R2024b
Design a 40th-order lowpass Chebyshev type II digital filter with a stopband edge frequency of 0.4 and stopband attenuation of 50 dB. Verify that the filter is minimum phase using the filter coefficients in the CTF format.
[B,A] = cheby2(40,50,0.4,"ctf"); flag = isminphase(B,A,"ctf")
flag = logical
1
Design a 30th-order bandpass elliptic digital filter with passband edge frequencies of 0.3 and 0.7, passband ripple of 0.1 dB, and stopband attenuation of 50 dB. Verify that the filter is minimum phase using the filter coefficients and gain in the CTF format.
[B,A,g] = ellip(30,0.1,50,[0.3 0.7],"ctf"); flag = isminphase({B,A,g},"ctf")
flag = logical
1
Input Arguments
Output Arguments
More About
Tips
You can obtain filters in
CTF format, including the scaling gain. Use the outputs of digital IIR filter design functions,
such as butter, cheby1, cheby2, and ellip. Specify the "ctf" filter-type argument in these
functions and specify to return B, A, and
g to get the scale values. (since R2024b)
References
[1] Lyons, Richard G. Understanding Digital Signal Processing. Upper Saddle River, NJ: Prentice Hall, 2004.
Version History
Introduced in R2013aSee Also
ctffilt | designfilt | digitalFilter | isallpass | islinphase | ismaxphase | isstable