Bibliothèque Mechanical Systems
Explorez des exemples qui illustrent la modélisation, le contrôle et la simulation de systèmes mécaniques.
Informations connexes
Sélection d՚exemples

Système masse-ressort-amortisseur avec contrôleur
Cet exemple présente un système masse-ressort-amortisseur contrôlé. Un contrôleur ajuste la force appliquée à la masse pour que sa position suive un signal de commande. La vitesse initiale de la masse est de 10 mètres par seconde. Le contrôleur ajuste la force appliquée par la source de force pour suivre les variations discrètes du signal d’entrée.
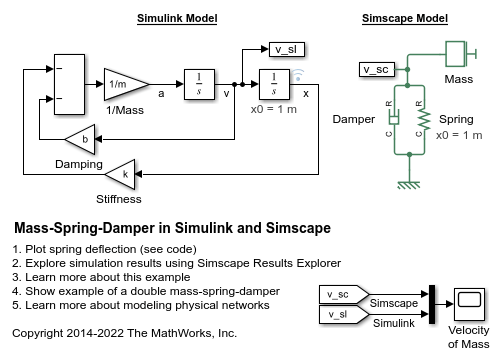
Système masse-ressort-amortisseur dans Simulink et Simscape
Cet exemple compare un modèle de système masse-ressort-amortisseur utilisant des blocs Simscape™ et des connexions physiques à un modèle utilisant des blocs Simulink® et des signaux.
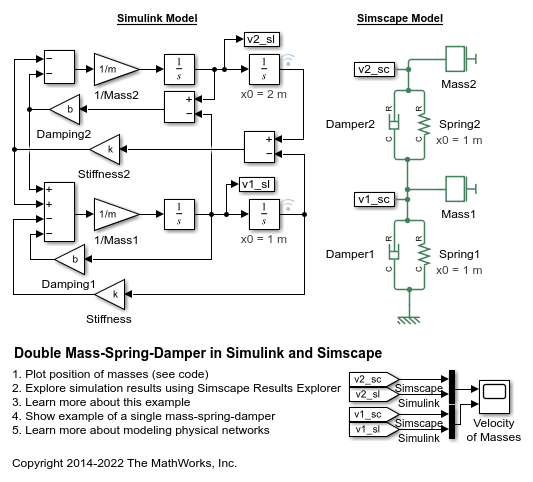
Système à double masse-ressort-amortisseur dans Simulink et Simscape
Cet exemple présente deux modèles de système à double masse-ressort-amortisseur : l’un utilise des blocs d’entrée/sortie Simulink® et l’autre utilise des réseaux physiques Simscape™.

Système mécanique simple
Cet exemple présente un modèle de système qui connecte des mouvements de rotation et de translation. Un levier de sommation commande une charge constituée d’une masse, d’un frottement visqueux et d’un ressort connecté à la liaison C. La liaison B est suspendue à deux ressorts de rotation connectés à un point de référence par une roue avec axe et une transmission. La liaison A est connectée à une source de couple par une transmission et un mécanisme de roue avec axe.

Système mécanique avec frottement en translation
Cet exemple présente une masse reliée à un ressort et à un amortisseur visqueux. La masse est commandée par une source de vitesse idéale à travers un élément de frottement. Le profil de mouvement de la source est choisi de manière à ce que le tracé du déplacement de la masse par rapport au déplacement assuré par la source produise une courbe d’hystérésis classique.

Système mécanique avec butée d’arrêt en translation
Cet exemple présente deux masses connectées par une butée d’arrêt. La masse 1 est commandée par une source de vitesse idéale. Lorsque la vitesse d’entrée change de sens, la masse 2 reste au repos jusqu’à ce que la masse 1 atteigne l’autre extrémité de sa course arrière modélisée par la butée d’arrêt en translation. Le tracé du déplacement de la masse 2 par rapport à la masse 1 produit une courbe d’hystérésis classique.
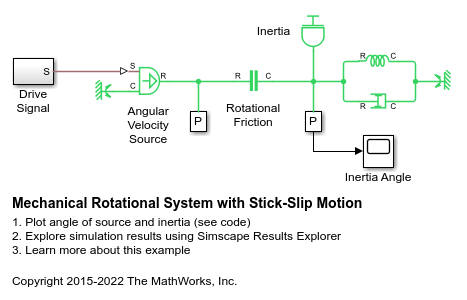
Système mécanique de rotation avec mouvement saccadé
Ce modèle présente un système mécanique de rotation avec frottement saccadé (stick-slip). Une inertie est connectée à un point fixe par un ressort et un amortisseur. Elle est commandée par une source de vitesse via un élément de frottement saccadé. Cet élément présente une différence entre les frottements de décollement et de Coulomb, ce qui provoque le mouvement saccadé de l’inertie.

Mécanisme de couplage
Dans cet exemple, vous allez découvrir comment utiliser le bloc Simscape™ Lever dans un mécanisme de couplage. Les leviers 1 et 4 sont des leviers de première catégorie qui se terminent par le pivot. Le levier 3 est un levier de deuxième catégorie où le pivot se trouve au milieu. Le levier 2 est un levier de sommation commandé par les premier et troisième leviers.

Pendulum in Cartesian and Polar Coordinates
Two different implementations of a planar pendulum.

Calculer le nombre pi avec des masses en collision
Cet exemple utilise un problème de physique bien connu pour démontrer la performance d'un solveur en capturant plusieurs dizaines de milliers d’événements instantanés qui se produisent en moins d’une seconde. Sur une trajectoire unidimensionnelle, une grande masse s’approche d’une petite masse derrière laquelle se trouve une paroi. Lorsque la grande masse heurte la petite, cette dernière rebondit sur la paroi et repart en sens inverse en direction de la grande masse. Chaque collision est parfaitement élastique. À mesure que la grande masse se rapproche de la paroi, les collisions avec la petite masse se produisent de plus en plus rapidement jusqu’à ce que la grande masse reparte en sens inverse et finisse par s’éloigner suffisamment rapidement dans la direction opposée pour que la petite masse ne la rattrape jamais.