getOffsetsForLPV
Extract LPV offsets from linearization results
Description
offsets = getOffsetsForLPV(info)info and converts
them to the array format supported by the LPV
System block.
Examples
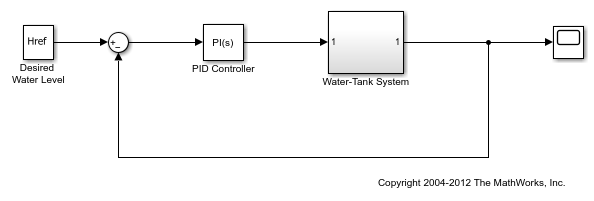
Open the Simulink® model.
model = 'watertank';
open_system(model)
Specify linearization I/Os.
io(1) = linio('watertank/Desired Water Level',1,'input'); io(2) = linio('watertank/Water-Tank System',1,'output');
Vary plant parameters A and b, and create a 3-by-4 parameter grid.
[A_grid,b_grid] = ndgrid(linspace(0.9*A,1.1*A,3),linspace(0.9*b,1.1*b,4)); params(1).Name = 'A'; params(1).Value = A_grid; params(2).Name = 'b'; params(2).Value = b_grid;
Create a linearization option set, setting the StoreOffsets option to true.
opt = linearizeOptions('StoreOffsets',true);
Linearize the model using the specified parameter grid, and return the linearization offsets in the info structure.
[sys,op,info] = linearize('watertank',io,params,opt);
Extract the linearization offsets.
offsets = getOffsetsForLPV(info)
offsets =
struct with fields:
x: [2×1×3×4 double]
y: [1×1×3×4 double]
u: [1×1×3×4 double]
dx: [2×1×3×4 double]
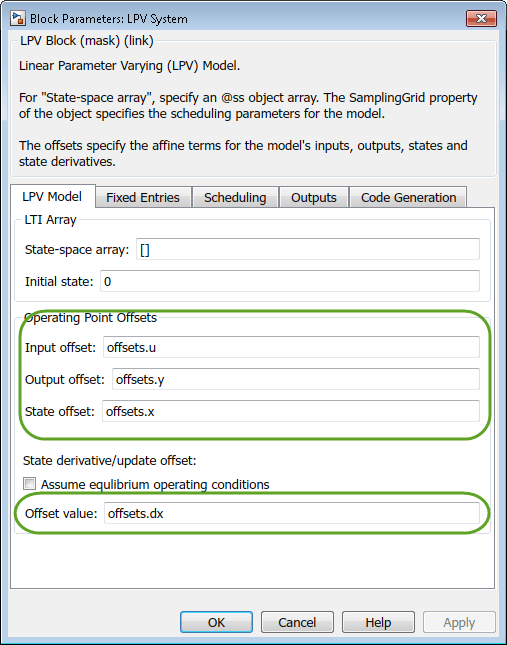
To configure an LPV System block, use the fields from offsets directly.
Input Arguments
Output Arguments
Version History
Introduced in R2016b