PX4 Hardware-in-the-Loop (HITL) Simulation with Fixed-Wing Plant in Simulink
This example shows how to use the UAV Toolbox Support Package for PX4® Autopilots to verify the controller design by deploying the design on the PX4 Autopilot hardware board. This is done in HITL mode with fixed-wing UAV Dynamics contained in Simulink®.
This example provides a reference model that helps you to design a flight controller algorithm to perform take-off, waypoint-following, loitering, and landing for a fixed-wing UAV plant model. Additionally, the example also provides a plant model which captures aspects such as aerodynamics, propulsion, ground contact, and sensors. This example demonstrates the following three workflows.
Follow a mission provided from QGC.
Manual Control with RC Joystick. For more information, see PX4 Hardware-in-the-Loop (HITL) Simulation with Manual Control for Fixed-Wing Plant in Simulink.
Execute a mission hardcoded in Simulink. For more information, see PX4 Hardware-in-the-Loop (HITL) Simulation with Fixed-Wing Plant and Hardcoded Mission in Simulink.
For information on fixed-wing plant model architecture, guidance logic, and conventions, see Fixed-Wing Plant and Controller Architecture.
Prerequisites
If you are new to Simulink, watch the Simulink Quick Start video.
If you have not performed the hardware setup, complete it before proceeding. For more information, see Hardware Setup.
Go through the PX4 Hardware-in-the-Loop System Architecture document to understand the physical connections required to set up the PX4 Autopilot and Simulink for HITL Simulation.
Configure and set up PX4 Autopilot in HITL mode. For more information, see Setting Up PX4 Autopilot in Hardware-in-the-Loop (HITL) Mode from QGroundControl.
Set up the PX4 Firmware as mentioned in Set Up PX4 Firmware for Hardware-in-the-Loop (HITL) Simulation. In the Select a PX4 Autopilot and Build Target screen, select any PX4 Autopilot as the PX4 Autopilot board and corresponding build target having
_fixedwingkeyword from the drop-down list. For example, if you are using Cube Orange as autopilot board then selectcubepilot_cubeorange_fixedwingas the build target.
Required Third-Party Software
Required Hardware
PX4 Autopilot flight controller
Micro USB (Universal Serial Bus) type-B cable
Micro-SD card
Run HITL Simulation
Note: Avoid running this example on a virtual machine. The virtual machine might display an error saying "unable to pace at specified rate" and the drone might crash.
Make Hardware Connections and Set Up the PX4 Autopilot in HITL Mode
This diagram shows the HITL setup and the physical communication between various modules.
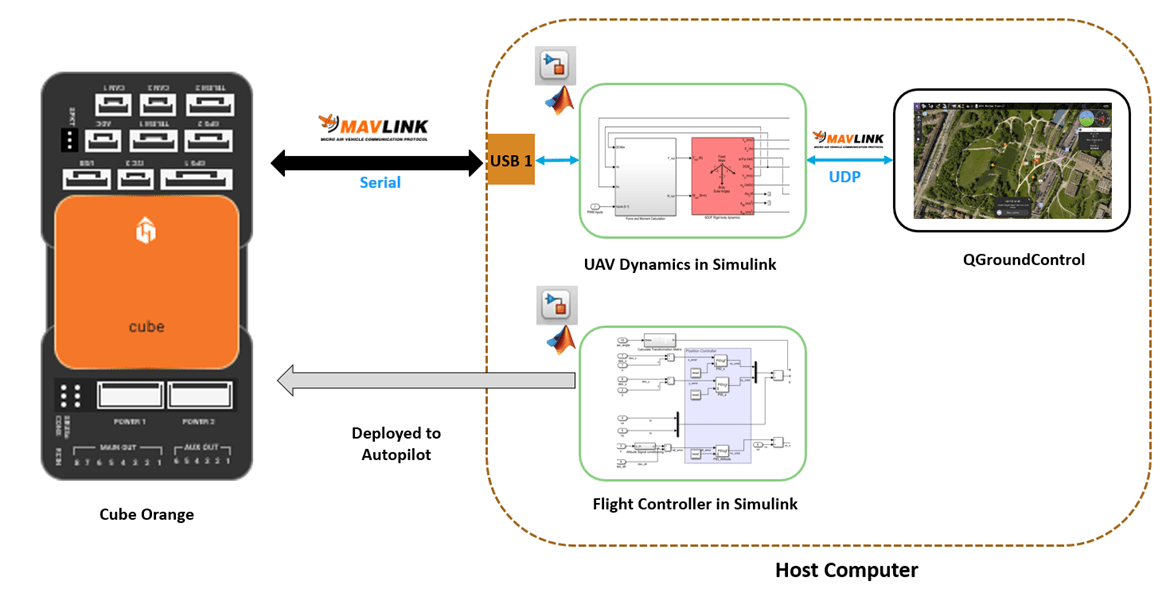
1. Connect your PX4 Autopilot board to the host computer using the USB cable.
2. Configure the PX4 Autopilot board in HITL mode as described in Setting Up PX4 Autopilot in Hardware-in-the-Loop (HITL) Mode from QGroundControl.
3. Set up the PX4 Firmware as described in Set Up PX4 Firmware for Hardware-in-the-Loop (HITL) Simulation.
Open MATLAB Project and Configure UAV Dynamics Model
1. Open MATLAB®.
2. Open the px4demo_HardwareInLoopWithSimulinkFixedWingPlant MATLAB project.
3. On the Project tab, in the Shortcuts section, click Launch Autonomous Control Model to launch the FixedWingGNC controller.

4. In the FixedWingGNC controller model, on the Hardware tab, in the Mode section, select Run on board (External mode).

Configure Simulink Controller Model for HITL Mode
1. The controller model is configured to run in HITL mode. If you are not using this example model, follow the instructions as described in Configure Simulink Model for Deployment in Hardware-in-the-Loop (HITL) Simulation.
Note: These steps are not required in the pre-configured model. Complete these steps if you have changed the hardware or not using the pre-configured model.
2. In the FixedWingGNC controller model, on the Hardware tab, in the Mode section, click Run on board and then select Run on board (External mode). If you see "Connected IO" selected instead of "Run on board," click on it and choose "Run on board (External mode)".
3. Click Build, Deploy & Start from Deploy section of Hardware tab in the Simulink Toolstrip for the Controller model.
This deploys the controller code on the PX4 Autopilot hardware and launches the QGroundControl (QGC).
Note: If you are using Ubuntu®, QGC might not launch automatically. To launch QGC, open Terminal and go to the folder where QGC is downloaded and run the following command:
./QGroundControl.AppImage
Run the UAV Dynamics Model
1. On the Project tab, in the Shortcuts section, click Launch UAV Dynamics to launch the Simulink UAV Dynamics model named UAV_Dynamics_Autopilot_Communication.
2. Verify MAVLink Communication in QGC.
Ensure that the parameter
COM_DISARM_PRFLTvalue is set to-1, in QGC.
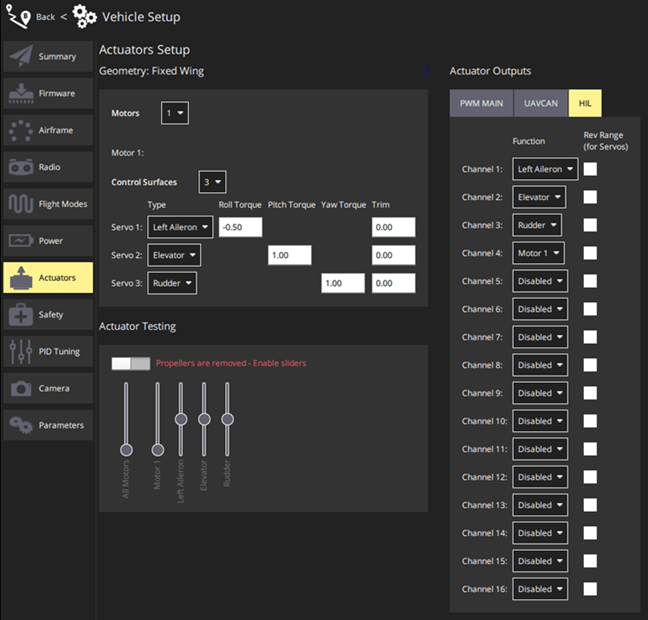
3. Configure the actuators in QGC. For more information, see Configure and Assign Actuators in QGC.
4. In the QGC, navigate to the Plan View.

5. This example provides a preplanned mission SampleMission.plan that you can upload to QGC. In the QGC, navigate and select SampleMission.plan file available in data folder of the MATLAB project.
After you upload the plan, the mission is visible in QGC.
6. Click Upload button in the QGC interface to upload the mission from QGroundControl.
7. Navigate to Fly View to view the uploaded mission.
8. Start the mission in QGC. The UAV should follow the mission path.
After the mission is started, the drone takes off and follows the set of waypoints from QGC. A sample screen is shown here.

Other Things to Try
Try running complex missions from QGC. A sample survey mission trajectory is shown here.

Add wind disturbances to the plant model.