pcalign
Align array of point clouds
Syntax
Description
ptCloudOut = pcalign(ptClouds,tforms)ptClouds, into one point
cloud by using the specified transformations tforms.
ptCloudOut = pcalign(ptClouds,tforms,gridStep)gridStep, to the aligned point cloud. The grid filter
returns a single point per 3-D box.
ptCloudOut = pcalign(___,GridFilter=gridFilterMethod)
Examples
Load a point cloud view set into the workspace.
data = load('vSetPointClouds.mat');
vSet = data.vSet;Extract the point clouds and their absolute poses from the view set.
ptClouds = vSet.Views.PointCloud; tforms = vSet.Views.AbsolutePose;
Align the point clouds using their absolute poses, and apply a 3-D box filter of size 1 to the aligned point cloud.
gridStep = 1; ptCloudMap = pcalign(ptClouds,tforms,gridStep);
Display the aligned point cloud map.
pcshow(ptCloudMap)
hold on
plot(vSet)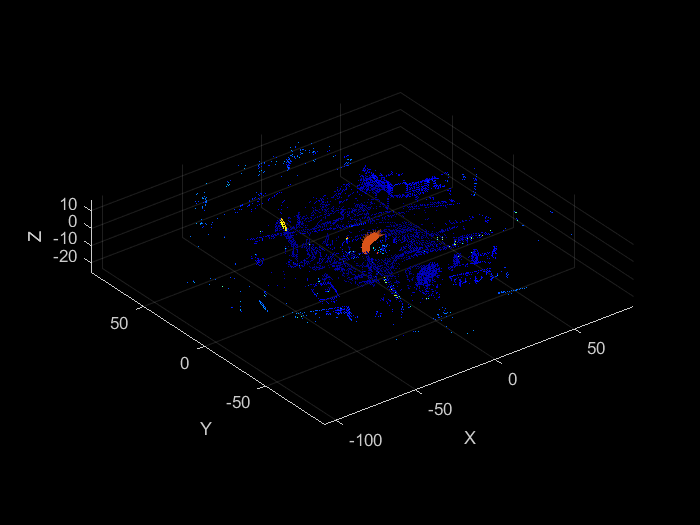
Input Arguments
Output Arguments
Tips
If the input point clouds do not all have an assigned value for a property, the function does not assign a value for that property in the returned point cloud. For example, if some of the input point clouds have values for the
Colorproperty but another one does not, then the function does not return a value for theColorproperty ofptCloudOut.The function filters out points with
NaNorInfvalues.
Extended Capabilities
Version History
Introduced in R2020bSee Also
Objects
Functions
pcplayer|pcshow|pcwrite|pcread|pcmerge|pcdownsample|pcfitplane|pcdenoise|pcregistericp|pccat