pcregistercpd
Register two point clouds using CPD algorithm
Syntax
Description
tform = pcregistercpd(moving,fixed)
Note
The CPD algorithm is robust to noise, outlier and missing points, at the
expense of speed. Consider downsampling point clouds using pcdownsample before using
pcregistercpd to improve the efficiency of
registration.
Alternatively, you can speed up the algorithm by using the extractFPFHFeatures (Lidar Toolbox) function to extract features before
performing registration. For more details, see the Improve CPD Performance Using FPFH Descriptors
example.
[___] = pcregistercpd(___,
specifies options using one or more name-value arguments in addition to any
combination of arguments from previous syntaxes. For example,
Name=Value)MaxIterations=20 stops the CPD algorithm after 20
iterations.
Examples
Load point cloud data into the workspace. Extract the moving and the fixed point clouds from the point cloud data in workspace.
handData = load('hand3d.mat');
moving = handData.moving;
fixed = handData.fixed;To improve the efficiency and accuracy of the CPD registration algorithm, downsample the moving and the fixed point clouds.
movingDownsampled = pcdownsample(moving,'gridAverage',0.03); fixedDownsampled = pcdownsample(fixed,'gridAverage',0.03);
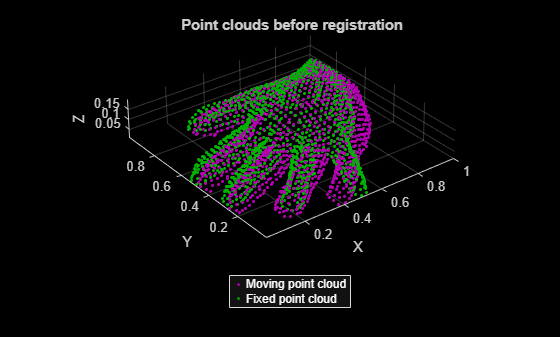
Display the downsampled point clouds before registration.
figure pcshowpair(movingDownsampled,fixedDownsampled,'MarkerSize',50) xlabel('X') ylabel('Y') zlabel('Z') title('Point clouds before registration') legend({'Moving point cloud','Fixed point cloud'},'TextColor','w') legend('Location','southoutside')
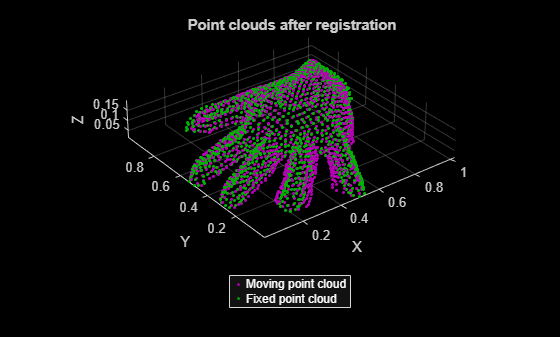
Perform non-rigid registration using the CPD algorithm.
[tform,movingReg] = pcregistercpd(movingDownsampled,fixedDownsampled);
Display the downsampled point clouds after registration.
figure pcshowpair(movingReg,fixedDownsampled,'MarkerSize',50) xlabel('X') ylabel('Y') zlabel('Z') title('Point clouds after registration') legend({'Moving point cloud','Fixed point cloud'},'TextColor','w') legend('Location','southoutside')
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
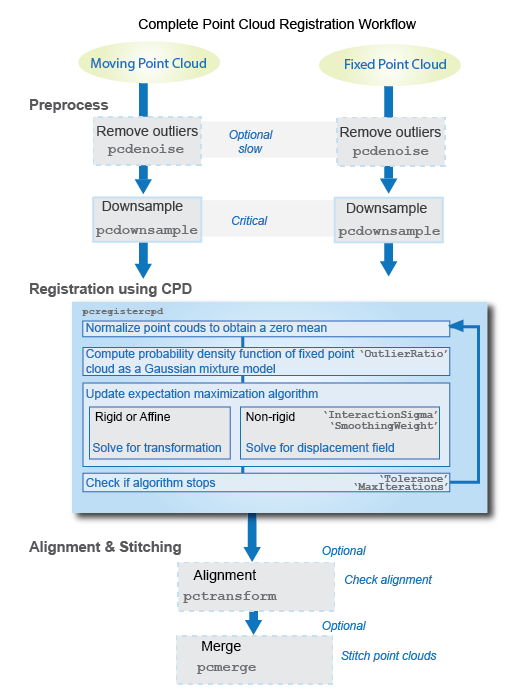
Both MaxIterations and
Tolerance are used
as stopping criteria. The algorithm stops when it satisfies either of the stopping
conditions, i.e., when the number of iteration reaches
MaxIterations or the absolute percentage change in log
likelihood function is less than or equal to Tolerance.
References
[1] Myronenko, A., and X. Song. "Point Set Registration: Coherent Point Drift. "Proceedings of IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI)." Vol 32, Number 12, December 2010, pp. 2262–2275.
Extended Capabilities
Version History
Introduced in R2018bSee Also
Functions
pcregistercorr|pcregistericp|pcregisterndt|pctransform|pcshow|pcshowpair|pcdownsample|pcfitplane|pcdenoise|pcmerge