showReprojectionErrors
Visualize calibration errors
Syntax
Description
showReprojectionErrors( displays a bar
graph that represents the calibration accuracy for a single camera, a stereo pair, a fisheye
camera, or a multi-camera system. For non-multi-camera systems, the bar graph shows the mean
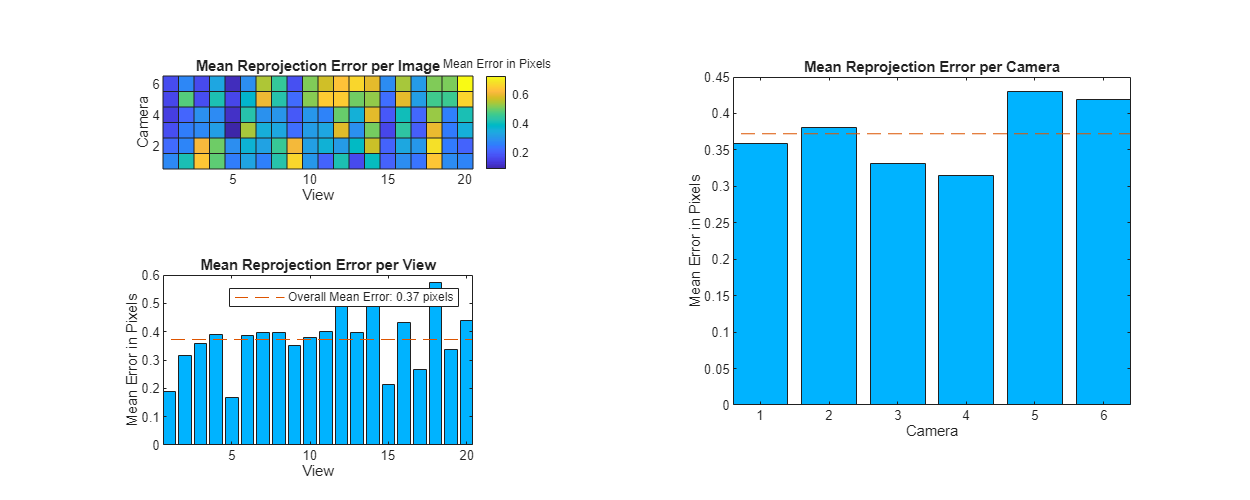
reprojection error for each image. For multi-camera systems, the graph is divided into three
sub-plots, displaying the mean reprojection error per image, per view, and per camera. A view
represents a specific position where the calibration pattern is observed by the cameras. The
cameraParams)cameraParams object contains one of:
cameraParametersorstereoParametersobject which theestimateCameraParametersfunction returns.fisheyeParametersor object which theestimateFisheyeParametersfunction returns.multiCameraParametersobject which theestimateMultiCameraParametersfunction returns.
showReprojectionErrors(
displays the reprojection errors using the visualization style specified by the
cameraParams,viewStyle)viewStyle input. The viewStyle argument is not
supported for a multi-camera system.
showReprojectionErrors(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example, Name=Value)HighlightIndex = [1,4] sets
the highlight patterns to 1 and 4.
Examples
Create a set of calibration images.
images = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","dslr")); imageFileNames = images.Files;
Detect calibration pattern.
[imagePoints,patternDims] = detectCheckerboardPoints(imageFileNames);
Generate world coordinates of the corners of the squares. The square size is in millimeters.
squareSize = 23; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
Calibrate the camera.
I = readimage(images,1); imageSize = [size(I, 1), size(I, 2)]; params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
Visualize the errors as a bar graph.
subplot(1,2,1); showReprojectionErrors(params);

Visualize the errors as a scatter plot.
subplot(1,2,2);
showReprojectionErrors(params,"ScatterPlot");
Specify calibration images
imageDir = fullfile(toolboxdir("vision"),"visiondata", ... "calibration","stereo"); leftImages = imageDatastore(fullfile(imageDir,"left")); rightImages = imageDatastore(fullfile(imageDir,"right"));
Detect the checkerboards.
[imagePoints,patternDims] = detectCheckerboardPoints(...
leftImages.Files,rightImages.Files);Specify world coordinates of checkerboard keypoints. The square size is in millimeters.
squareSize = 108; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
Calibrate the stereo camera system. Here both cameras have the same resolution.
I = readimage(leftImages,1); imageSize = size(I,1:2); params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
Visualize calibration accuracy.
showReprojectionErrors(params);

Estimate the relative position and orientation of six cameras with overlapping fields of view by using calibration images that contain a single ChArUco board.
Download the calibration images.
calibImagesURL = "https://www.mathworks.com/supportfiles/vision/data/overlapping-cameras-charuco.zip"; calibImagesDir = fullfile(pwd,"overlapping-cameras-charuco"); calibImagesZip = fullfile(pwd,"overlapping-cameras-charuco.zip"); if ~exist(calibImagesZip,"file") disp("Downloading calibration images (52 MB)...") websave(calibImagesZip,calibImagesURL); end
Downloading calibration images (52 MB)...
if ~exist(calibImagesDir,"dir") unzip(calibImagesZip,pwd) end
Specify calibration image filenames for each camera.
numCameras = 6; camDirPrefix = "Cam00"; imageFiles = cell(1,numCameras); for i = 1:numCameras camDir = fullfile(calibImagesDir,camDirPrefix+i); imds = imageDatastore(camDir); imageFiles{i} = imds.Files; end imageFiles = [imageFiles{:}];
Define the ChArUco board properties. Specify checker size and marker size in centimeters.
markerFamily = "DICT_6X6_1000"; patternDims = [5 5]; markerSize = 6.8; % in cm checkerSize = 9.15; % in cm numKeyPoints = prod(patternDims - 1); minMarkerId = 144;
Detect the key points of the ChArUco board in the calibration images.
imagePoints = detectPatternPoints(imageFiles,"charuco-board",patternDims, ... markerFamily,checkerSize,markerSize,MinMarkerID=minMarkerId);
[==================================================] 100% Elapsed time: 00:00:09 Estimated time remaining: 00:00:00
Generate the world points for the pattern.
worldPoints = patternWorldPoints("charuco-board",patternDims,checkerSize);Load the intrinsic parameters of the six cameras. These parameters have been estimated using the Using the Single Camera Calibrator App.
ld = load("sixCameraIntrinsics.mat");Perform multi-camera calibration.
params = estimateMultiCameraParameters(imagePoints,worldPoints,ld.intrinsics,WorldUnits="cm");Visualize the calibration accuracy.
figure(Position=[100,100,1000,400]) showReprojectionErrors(params)
Visualize the camera extrinsic parameters.
figure showExtrinsics(params) view(2)

Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2014a
See Also
Apps
Functions
estimateMultiCameraParameters|plotCamera|estimateCameraParameters|showExtrinsics|undistortImage|detectCheckerboardPoints|generateCheckerboardPoints|patternWorldPoints|detectPatternPoints