Statistiques
0 Questions
4 Réponses
29 Publications
RANG
7 253
of 301 947
RÉPUTATION
6
CONTRIBUTIONS
0 Questions
4 Réponses
ACCEPTATION DE VOS RÉPONSES
0.00%
VOTES REÇUS
1
RANG
of 21 470
RÉPUTATION
N/A
CLASSEMENT MOYEN
0.00
CONTRIBUTIONS
0 Fichier
TÉLÉCHARGEMENTS
0
ALL TIME TÉLÉCHARGEMENTS
0
RANG
of 177 561
CONTRIBUTIONS
0 Problèmes
0 Solutions
SCORE
0
NOMBRE DE BADGES
0
CONTRIBUTIONS
29 Publications
CONTRIBUTIONS
0 Public Chaîne
CLASSEMENT MOYEN
CONTRIBUTIONS
0 Point fort
NOMBRE MOYEN DE LIKES




{kind=link}
{kind=link}
{kind=link}
{kind=link}
Feeds
Publié le
Robots That Adapt at Run Time Across Changing Configurations
Robotic systems are often required to operate in environments that change during operation. This may include switching...
3 mois il y a
Publié le
Generating Synthetic Data for Urban Autonomy with Intersection-Centered Traffic Model
Developing ADAS and Automated Driving systems for urban environments is a high-stakes challenge. Intersections are...
6 mois il y a

Publié le
Modeling Starts With the Question – On model fidelity, abstraction, and engineering judgement
Guest BloggerGeorge Amarantidis Koronaios is a Developer Advocate at MathWorks. He focuses on technical engagement with the...
6 mois il y a
Publié le
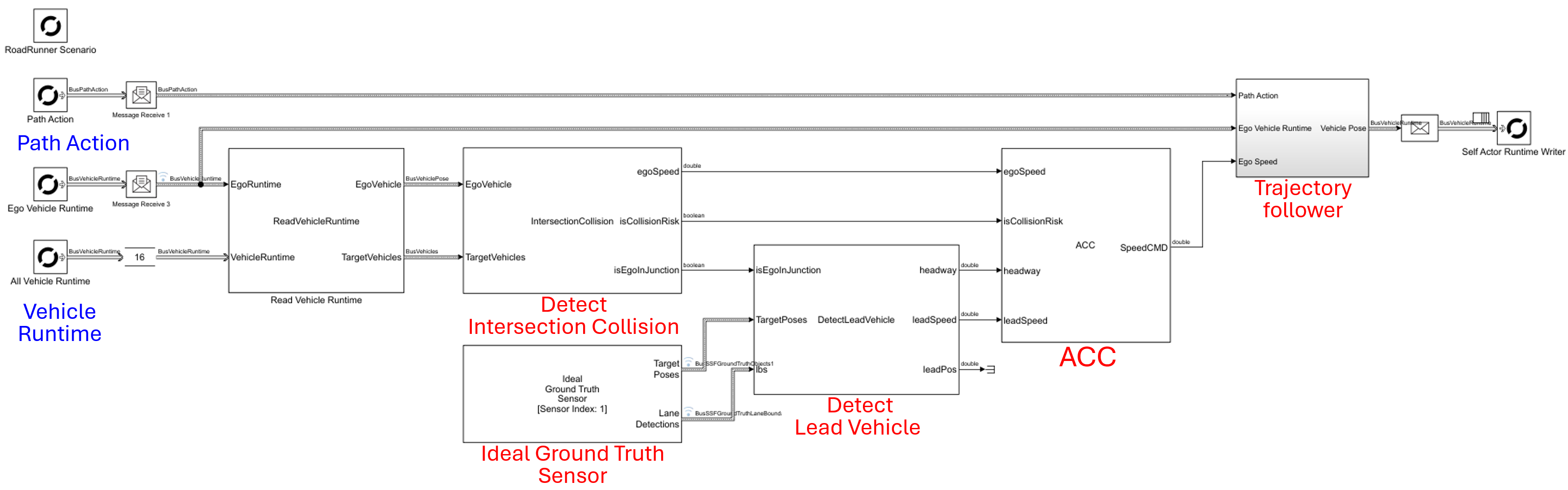
Scalable Actor Behavior Design for Randomized Traffic in RoadRunner
The previous post introduced a MATLAB-based traffic swarm framework capable of generating randomized ambient traffic with...
6 mois il y a
Publié le
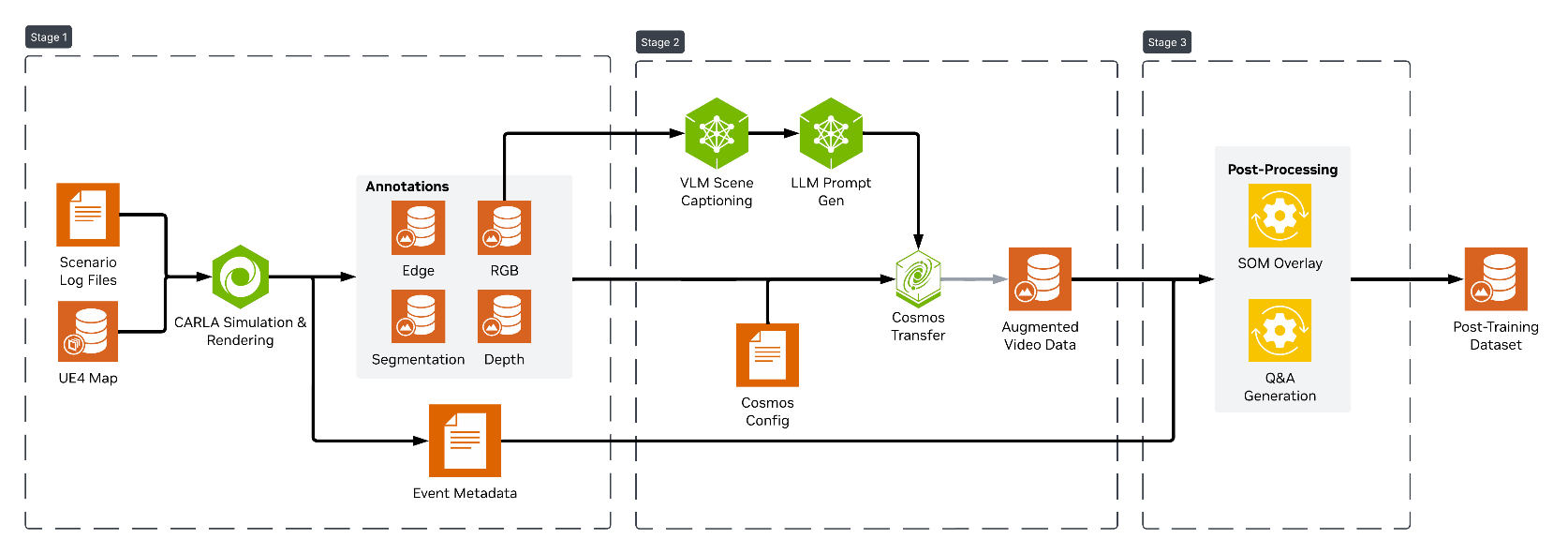
Leveraging RoadRunner to Support NVIDIA’s Synthetic Data Generation Workflow by Creating Realistic Traffic Scenarios
NVIDIA has recently introduced a Synthetic Data Generation (SDG) workflow for traffic scenarios, enabling the creation of...
6 mois il y a
Publié le
Why Digital Twins Are the Key to Safer, Smarter Offroad Machines
The next wave of innovation isn’t happening on roads or highways — it’s unfolding in fields, mines, and construction sites....
11 mois il y a

Publié le
Generative AI + Robotics = Awesome!
Generative AI for Robotics with MATLAB and…
plus d'un an il y a

Publié le
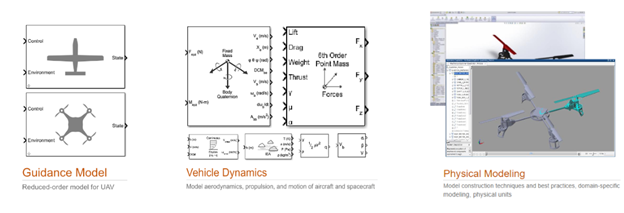
Leveraging Simulink and Cube Autopilots for Autonomous System Development
Autonomous systems have emerged as transformative technologies across industries, from Unmanned Aerial Vehicles (UAVs) to...
plus d'un an il y a

Publié le
Build and Deploy SLAM Workflows with MATLAB
Explore the essentials of SLAM and its role in robotics and autonomous systems. This blog post by our expert Jose Avendano...
plus d'un an il y a
Publié le
Developing Inertial Navigation Systems with MATLAB – From Sensor Simulation to Sensor Fusion
I recently worked with Eric Hillsberg, Product Marketing Engineer, to assess MathWorks’ tools for inertial navigation,...
environ 2 ans il y a
Publié le
Crafting the Robots of Tomorrow: The Power of Robot Simulation with MATLAB and Simulink
Recently, George Chowdhury, an industry analyst of robotics from ABI Research, interviewed me on the significance of...
environ 2 ans il y a
Publié le
Accelerating the path to production for your autonomous system with RTI Connext and the ROS Toolbox
Our guest blogger is Akkshaj Singh, an Application Engineer at RTI with a focus on Commercial Markets and Security. He has...
environ 2 ans il y a

Publié le
How NASA Langley is Using MATLAB and Simulink to Accelerate Development and Testing of Multirotor Flight Control
In this blog post, my colleagues Ronal George and Julia Brault helped me feature a project at NASA Langley Research Center...
environ 2 ans il y a

Publié le
How MathWorks is Enabling Supernal’s Advanced Air Mobility Development with Integrated Simulation Systems
Co-authored by Mihir Acharya, Senior Product Manager, Robotics and Autonomous Systems at MathWorks, and Fahad Khan, Head of...
environ 2 ans il y a

Publié le
Enabling Off-Road Simulation with MATLAB and MSU Autonomous Vehicle Simulator (MAVS)
Autonomous vehicle technology is now venturing beyond the structured confines of urban landscapes into unpredictable...
plus de 2 ans il y a

Publié le
🤖💡 Making Remote Robot Software Updates a Breeze: Discover the Power of ROS Toolbox & Automated Tools
In the dynamic world of robotics, ensuring that your robots operate with the latest software is a cornerstone of...
plus de 2 ans il y a

Publié le
Practical Challenges in Deploying Autonomy to Offroad Vehicles
In this MathWorks fireside chat, MathWorks Robotics Industry Manager, Dr. You Wu, sat down with two distinguished leaders...
plus de 2 ans il y a

Publié le
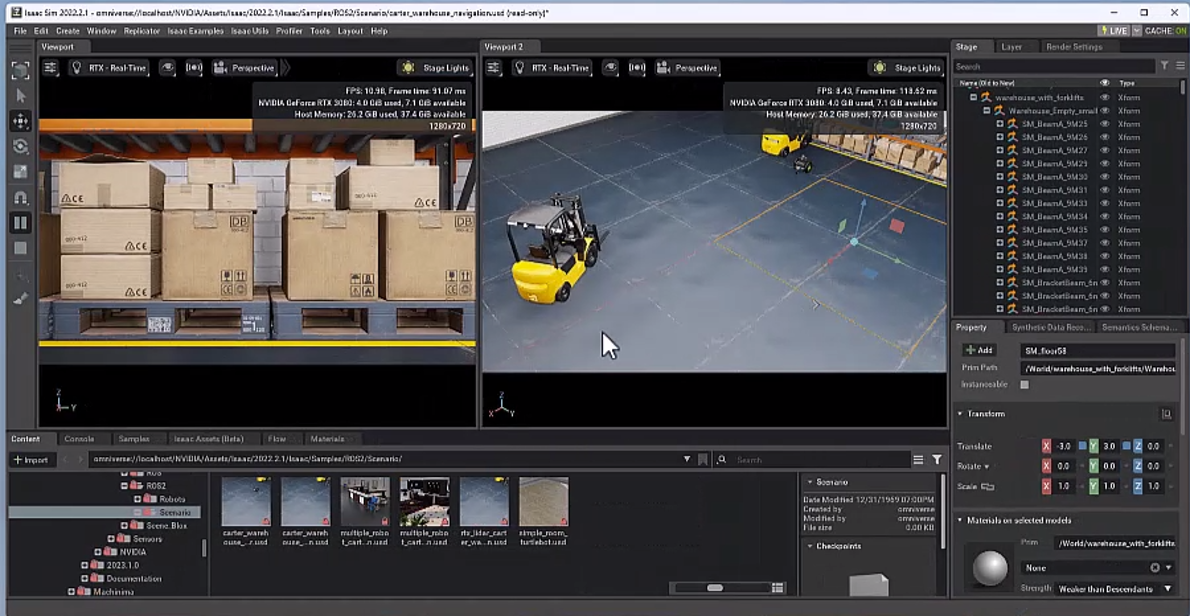
Building Realistic Robot Simulations with MATLAB and NVIDIA Isaac Sim
In this blog post, my colleague Dave Schowalter will introduce you to a new ecosystem that combines the photo-realistic...
presque 3 ans il y a
Publié le
Overcoming 4 Key Challenges in Cobot Software Development
Close your eyes and picture a collaborative robot (Cobot) in action. What do you see? For me it’s a robot able to...
presque 3 ans il y a
Publié le
Accelerate Aerial Autonomy with Simulink and Microsoft Project AirSim
In this blog post, we’re going to take a deep dive into a co-simulation workflow using Microsoft’s Project AirSim and...
presque 3 ans il y a

Publié le
Prevent UAV Crashes with Integrated Simulation Workflows: Insights from AUVSI Xponential 2023
The possibility of Unmanned Aerial Systems (UAS/UAV) improving day-to-day transportation seems closer than ever, with...
environ 3 ans il y a
Publié le
Join us at MATLAB EXPO 2023
MATLAB EXPO is back! Join us virtually on May 10-11, 2023. Attending the event is free, but you must register in advance....
environ 3 ans il y a
Publié le
Using MATLAB for Robotics Education
This post is from Peter Corke, a professor, researcher, teacher and writer about robotics and robotic...
plus de 3 ans il y a
Publié le
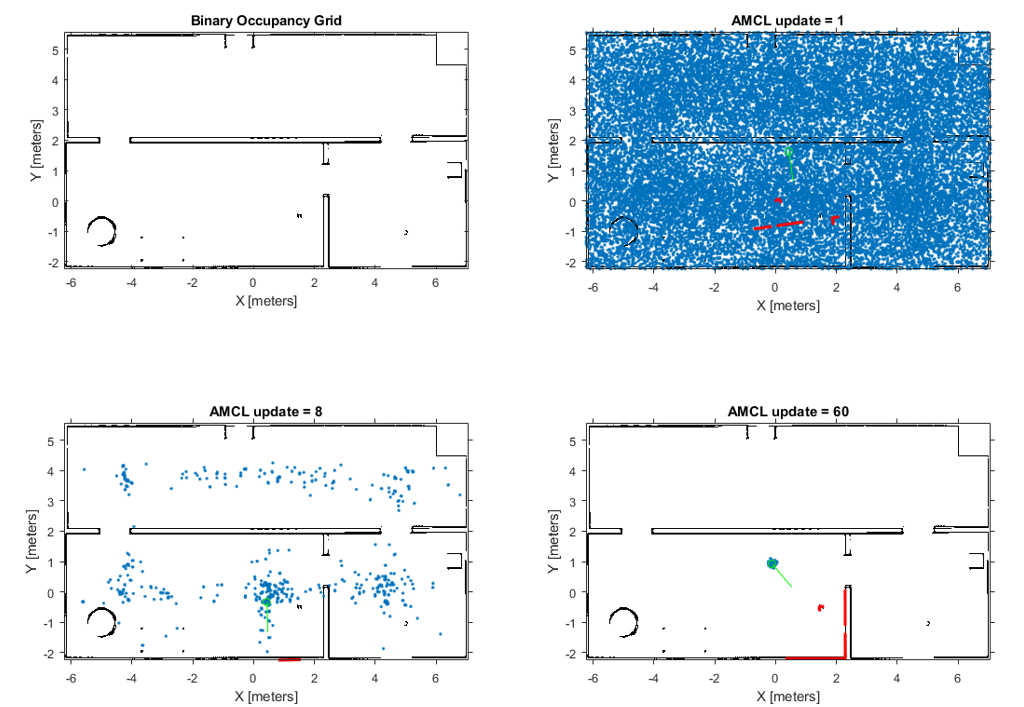
Intuition Behind the Particle Filter
Autonomous Navigation with Brian Douglas: Part 5 This post is from Brian Douglas, YouTube content creator for Control...
plus de 3 ans il y a
Publié le
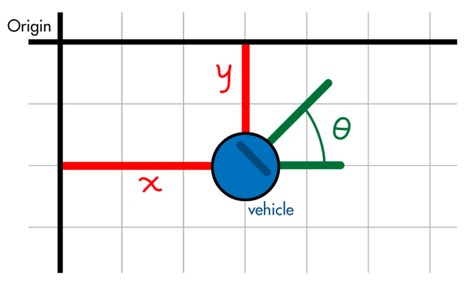
Where am I? (The Localization Problem)
Autonomous Navigation with Brian Douglas: Part 4 This post is from Brian Douglas, YouTube content creator for Control...
plus de 3 ans il y a
Publié le
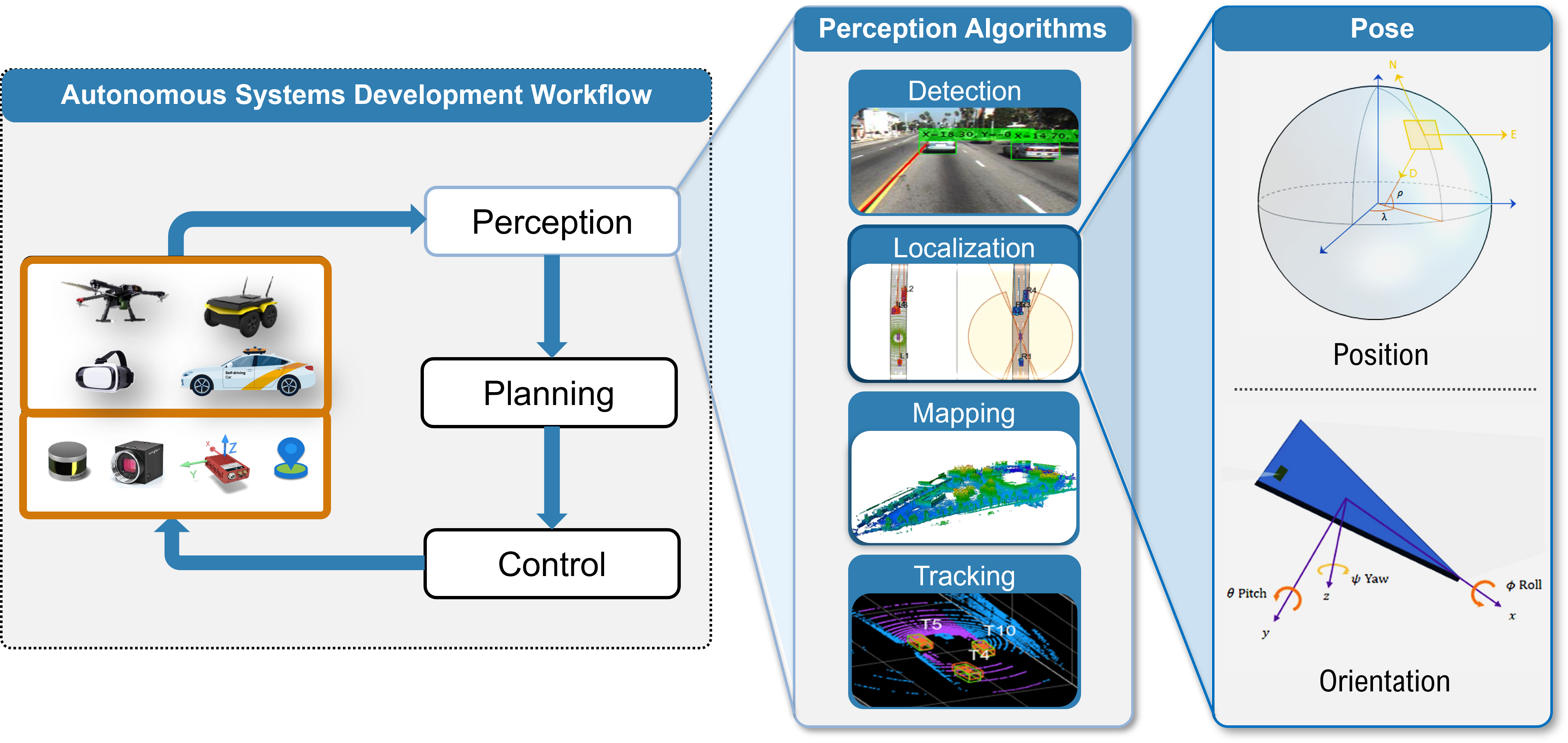
4 Capabilities of Autonomous Navigation Systems
Autonomous Navigation with Brian Douglas: Part 3 This post is from Brian Douglas, YouTube content creator for Control...
plus de 3 ans il y a
Publié le
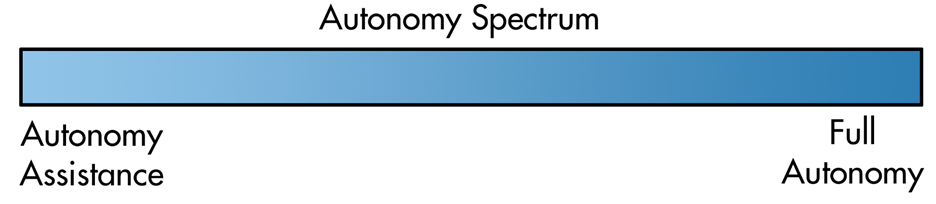
Autonomous Navigation with Brian Douglas, Part 2: Heuristic vs Optimal Approach for Full Autonomy
What is autonomous navigation? we learnt that in the last post of this blog series. In this one, Brian will talk about...
plus de 3 ans il y a
Publié le
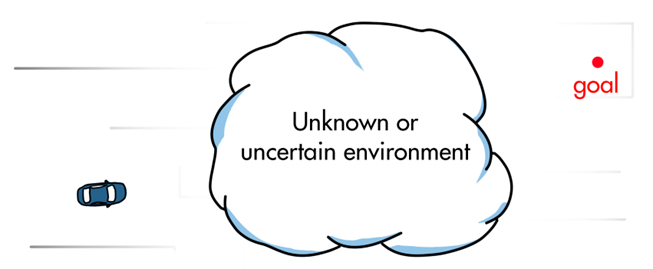
Autonomous Navigation with Brian Douglas, Part 1: Introduction
How do robots and autonomous vehicles navigate in different environments? We collaborated with Brian Douglas to help you...
plus de 3 ans il y a
Publié le
Welcome to the Autonomous Systems Blog!
With robots delivering packages, driverless robo-taxis showing up for the rides and humans co-working with machines, we are...
presque 4 ans il y a

Using Simulink, ROS, and Gazebo
This is great question. Simulink vs. Gazebo: Simulink is a graphical environment for designing, simulating, and testing system...
plus de 4 ans il y a | 1
| A accepté