Catalog of Model Interconnections
Each type of block diagram connection corresponds to a model interconnection command or arithmetic expression. The following tables summarize the block diagram connections with the corresponding interconnection command and arithmetic expression.
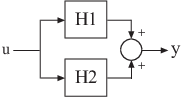
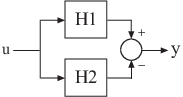
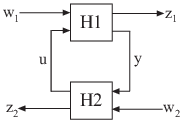
Model Interconnection Commands
Arithmetic Operations
You can apply almost all arithmetic operations to dynamic system models, including those shown below.
|
Operation |
Description |
|---|---|
+ |
Addition |
|
|
Subtraction |
|
|
Multiplication |
|
|
Element-by-element multiplication |
|
|
Right matrix divide |
|
|
Left matrix divide |
|
|
Matrix inversion |
|
| Conjugate transposition. See |
|
|
Transposition |
|
|
Powers of a dynamic system model, as in the following syntax for creating transfer functions: s = tf('s');
G = 25/(s^2 + 10*s + 25); |
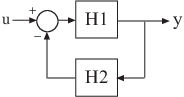
In some cases, you might obtain better results using model interconnection
commands, such as feedback or connect, instead of model
arithmetic. For example, the command T = feedback(H1,H2) returns
better results than the algebraic expression T = H1/(1+H2*H1).
The latter expression duplicates the poles of H1, which inflates
the model order and might lead to computational inaccuracy.
See Also
connect | feedback | series | parallel