gamultiobj
Trouver le front de Pareto de plusieurs fonctions fitness à l'aide d'un algorithme génétique
Syntaxe
Description
x = gamultiobj(fun,nvars)x sur les Front de Pareto des fonctions objectif définies dans fun. nvars est la dimension du problème d'optimisation (nombre de variables de décision). La solution x est locale, ce qui signifie qu'elle pourrait ne pas être sur le front global de Pareto.
Remarque
Passing Extra Parameters explique comment passer des paramètres supplémentaires à la fonction objectif et aux fonctions de contrainte non linéaire, si nécessaire.
x = gamultiobj(fun,nvars,A,b,Aeq,beq)x soumis aux égalités linéaires et aux inégalités linéaires , voir Linear Equality Constraints. (Définissez A = [] et b = [] si aucune inégalité n'existe.) gamultiobj supporte les contraintes linéaires uniquement pour l'option PopulationType par défaut ('doubleVector').
x = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub)x de sorte qu'un ensemble de Pareto local soit trouvé dans la plage lb ≤ x ≤ ub, voir Bound Constraints. Utilisez des matrices vides pour Aeq et beq si aucune contrainte d'égalité linéaire n'existe. gamultiobj supporte les contraintes bornées uniquement pour l'option PopulationType par défaut ('doubleVector').
x = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon)nonlcon. La fonction nonlcon accepte x et renvoie les vecteurs c et ceq, représentant respectivement les inégalités et égalités non linéaires. gamultiobj minimise fun tel que c(x) ≤ 0 et ceq(x) = 0. (Définissez lb = [] et ub = [] si aucune limite n'existe.) gamultiobj supporte les contraintes non linéaires uniquement pour l'option PopulationType par défaut ('doubleVector').
x = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,options)x = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,options)x avec les paramètres d'optimisation par défaut remplacés par des valeurs dans options. Créez options en utilisant optimoptions (recommandé) ou une structure.
x = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon)x = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options)intcon prennent des valeurs entières.
Remarque
Lorsqu'il y a des contraintes d'entier, gamultiobj n'accepte pas les contraintes d'égalité non linéaires, uniquement les contraintes d'inégalité non linéaires.
Exemples
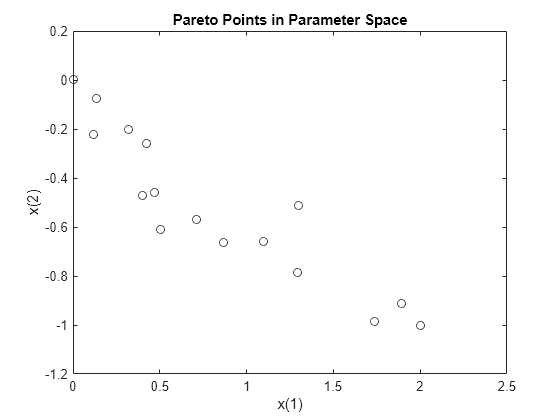
Trouvez le front de Pareto pour un problème multiobjectif simple. Il y a deux objectifs et deux variables de décision x.
fitnessfcn = @(x)[norm(x)^2,0.5*norm(x(:)-[2;-1])^2+2];
Trouvez le front de Pareto pour cette fonction objectif.
rng default % For reproducibility x = gamultiobj(fitnessfcn,2);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
Tracez les points de solution.
plot(x(:,1),x(:,2),'ko') xlabel('x(1)') ylabel('x(2)') title('Pareto Points in Parameter Space')
Pour voir l’effet d’une contrainte linéaire sur ce problème, voir Problème multi-objectif avec contrainte linéaire.
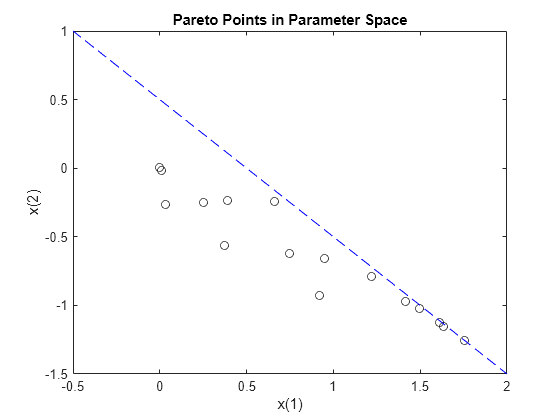
Cet exemple montre comment trouver le front de Pareto pour un problème multiobjectif en présence d'une contrainte linéaire.
Il y a deux fonctions objectif et deux variables de décision x.
fitnessfcn = @(x)[norm(x)^2,0.5*norm(x(:)-[2;-1])^2+2];
La contrainte linéaire est .
A = [1,1]; b = 1/2;
Trouvez le front de Pareto.
rng default % For reproducibility x = gamultiobj(fitnessfcn,2,A,b);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
Tracez la solution contrainte et la contrainte linéaire.
plot(x(:,1),x(:,2),'ko') t = linspace(-1/2,2); y = 1/2 - t; hold on plot(t,y,'b--') xlabel('x(1)') ylabel('x(2)') title('Pareto Points in Parameter Space') hold off
Pour voir l’effet de la suppression de la contrainte linéaire de ce problème, voir Problème à objectifs multiples simple.
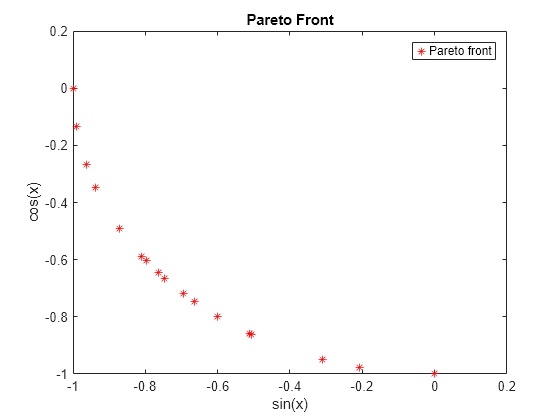
Trouvez le front de Pareto pour les deux fonctions fitness sin(x) et cos(x) sur l'intervalle .
fitnessfcn = @(x)[sin(x),cos(x)]; nvars = 1; lb = 0; ub = 2*pi; rng default % for reproducibility x = gamultiobj(fitnessfcn,nvars,[],[],[],[],lb,ub)
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
x = 18×1
4.7124
4.7124
3.1415
3.6733
3.9845
3.4582
3.9098
4.4409
4.0846
3.8686
⋮
Tracez la solution. gamultiobj trouve des points le long de l'ensemble du front de Pareto.
plot(sin(x),cos(x),'r*') xlabel('sin(x)') ylabel('cos(x)') title('Pareto Front') legend('Pareto front')
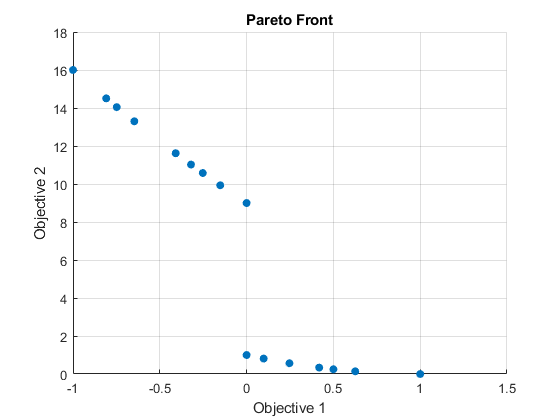
Trouvez et tracez le front de Pareto pour la deuxième fonction de Schaffer à deux objectifs. Cette fonction a un front de Pareto déconnecté.
Copiez ce code dans un fichier de fonction sur votre chemin MATLAB ®.
function y = schaffer2(x) % y has two columns % Initialize y for two objectives and for all x y = zeros(length(x),2); % Evaluate first objective. % This objective is piecewise continuous. for i = 1:length(x) if x(i) <= 1 y(i,1) = -x(i); elseif x(i) <=3 y(i,1) = x(i) -2; elseif x(i) <=4 y(i,1) = 4 - x(i); else y(i,1) = x(i) - 4; end end % Evaluate second objective y(:,2) = (x -5).^2;
Tracez les deux objectifs.
x = -1:0.1:8; y = schaffer2(x); plot(x,y(:,1),'r',x,y(:,2),'b'); xlabel x ylabel 'schaffer2(x)' legend('Objective 1','Objective 2')
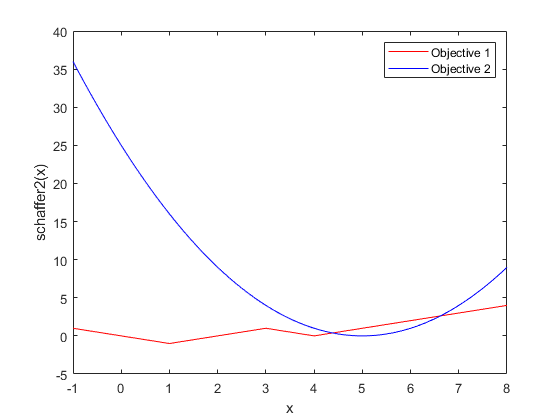
Les deux fonctions objectif sont en compétition pour x dans les plages [1,3] et [4,5]. Mais le front Pareto-optimal ne se compose que de deux régions déconnectées, correspondant aux x dans les plages [1,2] et [4,5]. Il y a des régions déconnectées car la région [2,3] est inférieure à [4,5]. Dans cette plage, l'objectif 1 a les mêmes valeurs, mais l'objectif 2 est plus petit.
Définissez des limites pour maintenir les membres de la population dans la plage ![]() .
.
lb = -5; ub = 10;
Définissez les options pour afficher le front de Pareto pendant que gamultiobj s'exécute.
options = optimoptions('gamultiobj','PlotFcn',@gaplotpareto);
Appelez gamultiobj.
rng default % For reproducibility [x,fval,exitflag,output] = gamultiobj(@schaffer2,1,[],[],[],[],lb,ub,options);
gamultiobj stopped because it exceeded options.MaxGenerations.
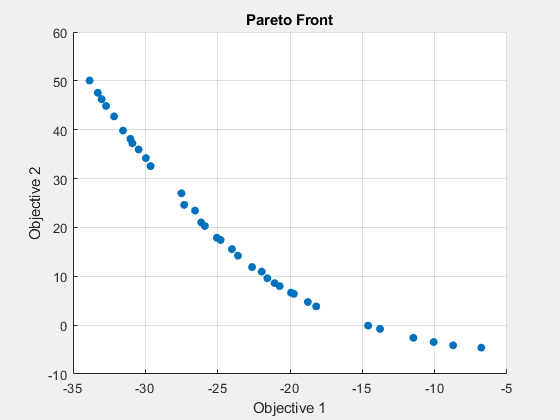
Créez une fonction à deux objectifs dans deux variables de problème.
rng default % For reproducibility M = diag([-1 -1]) + randn(2)/4; % Two problem variables fun = @(x)[(x').^2 / 30 + M*x']; % Two objectives
Précisez que la deuxième variable doit être un entier.
intcon = 2;
Spécifiez les limites du problème, la fonction de tracé gaplotpareto et une taille de population de 100.
lb = [0 0]; ub = [100 50]; options = optimoptions("gamultiobj","PlotFcn","gaplotpareto",... "PopulationSize",100);
Trouvez l’ensemble de Pareto pour le problème.
nvars = 2; A = []; b = []; Aeq = []; beq = []; nonlcon = []; [x,fval] = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
Énumérez dix solutions et remarquez que la deuxième variable a une valeur entière.
x(1:10,:)
ans = 10×2
8.3393 28.0000
12.9927 49.0000
7.1611 27.0000
7.0210 18.0000
0.0004 12.0000
9.0989 44.0000
9.3974 29.0000
0.5537 17.0000
6.4010 17.0000
7.0531 31.0000
Exécutez un problème multiobjectif simple et obtenez toutes les sorties disponibles.
Régler le générateur de nombres aléatoires pour la reproductibilité.
rng default
Définissez les fonctions fitness sur kur_multiobjective, une fonction qui possède trois variables de contrôle et renvoie deux valeurs de fonction fitness.
fitnessfcn = @kur_multiobjective; nvars = 3;
La fonction kur_multiobjective a le code suivant.
function y = kur_multiobjective(x) %KUR_MULTIOBJECTIVE Objective function for a multiobjective problem. % The Pareto-optimal set for this two-objective problem is nonconvex as % well as disconnected. The function KUR_MULTIOBJECTIVE computes two % objectives and returns a vector y of size 2-by-1. % % Reference: Kalyanmoy Deb, "Multi-Objective Optimization using % Evolutionary Algorithms", John Wiley & Sons ISBN 047187339 % Copyright 2007 The MathWorks, Inc. % Initialize for two objectives y = zeros(2,1); % Compute first objective for i = 1:2 y(1) = y(1) - 10*exp(-0.2*sqrt(x(i)^2 + x(i+1)^2)); end % Compute second objective for i = 1:3 y(2) = y(2) + abs(x(i))^0.8 + 5*sin(x(i)^3); end
Définissez des limites inférieures et supérieures pour toutes les variables.
ub = [5 5 5]; lb = -ub;
Trouvez le front de Pareto et toutes les autres sorties pour ce problème.
[x,fval,exitflag,output,population,scores] = gamultiobj(fitnessfcn,nvars, ...
[],[],[],[],lb,ub);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
Examinez les tailles de certaines des variables renvoyées.
sizex = size(x) sizepopulation = size(population) sizescores = size(scores)
sizex =
18 3
sizepopulation =
50 3
sizescores =
50 2
Le front de Pareto renvoyé contient 18 points. La population finale compte 50 membres. Chaque ligne population comporte trois dimensions, correspondant aux trois variables de décision. Chaque ligne scores comporte deux dimensions, correspondant aux deux fonctions fitness.
Arguments d'entrée
Arguments de sortie
En savoir plus
Un front de Pareto est un ensemble de points dans l'espace des paramètres (l'espace des variables de décision) qui ont des valeurs de fonction fitness non inférieures.
En d’autres termes, pour chaque point du front de Pareto, vous ne pouvez améliorer une fonction fitness qu’en dégradant une autre. Pour plus de détails, voir What Is Multiobjective Optimization?
Comme dans Local vs. Global Optima, il est possible qu'un front de Pareto soit local, mais pas global. « Local » signifie que les points de Pareto peuvent être non inférieurs par rapport aux points proches, mais les points plus éloignés dans l'espace des paramètres pourraient avoir des valeurs de fonction inférieures dans chaque composant.
Algorithmes
gamultiobj utilise un algorithme génétique contrôlé et élitiste (une variante de NSGA-II [1]). Une GA élitiste favorise toujours les individus ayant une meilleure valeur de fitness (rang). Une AG élitiste contrôlée favorise également les individus qui peuvent contribuer à accroître la diversité de la population même s’ils ont une valeur de fitness plus faible. Il est important de maintenir la diversité de la population pour converger vers un front de Pareto optimal. La diversité est maintenue en contrôlant les membres de l’élite de la population à mesure que l’algorithme progresse. Deux options, ParetoFraction et DistanceMeasureFcn, contrôlent l'élitisme. ParetoFraction limite le nombre d'individus sur le front de Pareto (membres de l'élite). La fonction distance, sélectionnée par DistanceMeasureFcn, permet de maintenir la diversité sur un front en favorisant les individus qui sont relativement éloignés sur le front. L'algorithme s'arrête si le spread, une mesure du mouvement du front de Pareto, est faible. Pour plus de détails, voir gamultiobj Algorithm.
Fonctionnalités alternatives
Application
La tâche Optimize du Live Editor fournit une interface visuelle pour gamultiobj.
Références
[1] Deb, Kalyanmoy. Multi-Objective Optimization Using Evolutionary Algorithms. Chichester, England: John Wiley & Sons, 2001.
Capacités étendues
Historique des versions
Introduit dans R2007b