ga
Trouver le minimum de fonction en utilisant un algorithme génétique
Syntaxe
Description
x = ga(fun,nvars)x, pour la fonction objectif, fun. nvars est la dimension (nombre de variables de conception) de fun.
Remarque
Passing Extra Parameters explique comment passer des paramètres supplémentaires à la fonction objectif et aux fonctions de contrainte non linéaire, si nécessaire.
x = ga(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon)nonlcon. La fonction nonlcon accepte x et renvoie les vecteurs C et Ceq, représentant respectivement les inégalités et égalités non linéaires. ga minimise les fun tels que C(x) ≤ 0 et Ceq(x) = 0. (Définissez lb=[] et ub=[] si aucune limite n'existe.)
x = ga(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon)x = ga(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options)intcon prennent des valeurs entières.
Remarque
Lorsqu'il y a des contraintes d'entier, ga n'accepte pas les contraintes d'égalité non linéaires, uniquement les contraintes d'inégalité non linéaires.
Exemples
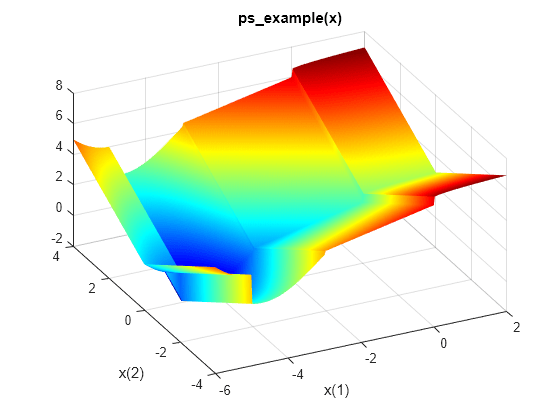
Le fichier ps_example.m est inclus lorsque vous exécutez cet exemple. Tracez la fonction.
xi = linspace(-6,2,300); yi = linspace(-4,4,300); [X,Y] = meshgrid(xi,yi); Z = ps_example([X(:),Y(:)]); Z = reshape(Z,size(X)); surf(X,Y,Z,'MeshStyle','none') colormap 'jet' view(-26,43) xlabel('x(1)') ylabel('x(2)') title('ps\_example(x)')
Trouvez le minimum de cette fonction en utilisant ga.
rng default % For reproducibility x = ga(@ps_example,2)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-4.6793 -0.0860
Utilisez l'algorithme génétique pour minimiser la fonction ps_example sur la région x(1) + x(2) >= 1 et x(2) <= 5 + x(1). Cette fonction est incluse lorsque vous exécutez cet exemple.
Tout d’abord, convertissez les deux contraintes d’inégalité sous la forme matricielle A*x <= b. En d'autres termes, récupérez les variables x du côté gauche de l'inégalité et rendez les deux inégalités inférieures ou égales :
-x(1) -x(2) <= -1
-x(1) + x(2) <= 5
A = [-1,-1;
-1,1];
b = [-1;5];Résolvez le problème contraint en utilisant ga.
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
0.9990 0.0000
Les contraintes sont satisfaites dans la limite de la valeur par défaut de la tolérance de contrainte, 1e-3. Pour voir cela, calculez A*x' - b, qui devrait avoir des composantes négatives.
disp(A*x' - b)
0.0010 -5.9990
Utilisez l'algorithme génétique pour minimiser la fonction ps_example sur la région x(1) + x(2) >= 1 et x(2) == 5 + x(1). Cette fonction est incluse lorsque vous exécutez cet exemple.
Tout d’abord, convertissez les deux contraintes sous la forme matricielle A*x <= b et Aeq*x = beq. En d'autres termes, récupérez les variables x du côté gauche des expressions et transformez l'inégalité en forme inférieure ou égale :
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
Résolvez le problème contraint en utilisant ga.
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-2.0005 2.9995
Vérifiez que les contraintes sont satisfaites dans la limite de la valeur par défaut de ConstraintTolerance, 1e-3.
disp(A*x' - b)
1.0000e-03
disp(Aeq*x' - beq)
8.5897e-09
Utilisez l'algorithme génétique pour minimiser la fonction ps_example sur la région x(1) + x(2) >= 1 et x(2) == 5 + x(1). La fonction ps_example est incluse lorsque vous exécutez cet exemple. De plus, définissez les limites 1 <= x(1) <= 6 et -3 <= x(2) <= 8.
Tout d’abord, convertissez les deux contraintes linéaires sous la forme matricielle A*x <= b et Aeq*x = beq. En d'autres termes, récupérez les variables x du côté gauche des expressions et transformez l'inégalité en forme inférieure ou égale :
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
Définissez les limites lb et ub.
lb = [1 -3]; ub = [6 8];
Résolvez le problème contraint en utilisant ga.
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq,lb,ub)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
1.0000 6.0000
Vérifiez que les contraintes linéaires sont satisfaites dans la limite de la valeur par défaut de ConstraintTolerance, 1e-3.
disp(A*x' - b)
-6.0000
disp(Aeq*x' - beq)
-7.9765e-08
Utilisez l'algorithme génétique pour minimiser la fonction ps_example sur la région et . La fonction ps_example est incluse lorsque vous exécutez cet exemple.
Pour ce faire, utilisez la fonction ellipsecons.m qui renvoie la contrainte d’inégalité dans la première sortie, c, et la contrainte d’égalité dans la deuxième sortie, ceq. La fonction ellipsecons est incluse lorsque vous exécutez cet exemple. Examinez le code ellipsecons.
type ellipseconsfunction [c,ceq] = ellipsecons(x) c = 2*x(1)^2 + x(2)^2 - 3; ceq = (x(1)+1)^2 - (x(2)/2)^4;
Inclure un handle de fonction pour ellipsecons comme argument nonlcon.
nonlcon = @ellipsecons; fun = @ps_example; rng default % For reproducibility x = ga(fun,2,[],[],[],[],[],[],nonlcon)
Optimization finished: average change in the fitness value less than options.FunctionTolerance and constraint violation is less than options.ConstraintTolerance.
x = 1×2
-0.9766 0.0362
Vérifiez que les contraintes non linéaires sont satisfaites à x. Les contraintes sont satisfaites lorsque c ≤ 0 et ceq = 0 dans la valeur par défaut de ConstraintTolerance, 1e-3.
[c,ceq] = nonlcon(x)
c = -1.0911
ceq = 5.4645e-04
Utilisez l'algorithme génétique pour minimiser la fonction ps_example sur la région x(1) + x(2) >= 1 et x(2) == 5 + x(1) en utilisant une tolérance de contrainte inférieure à la valeur par défaut. La fonction ps_example est incluse lorsque vous exécutez cet exemple.
Tout d’abord, convertissez les deux contraintes sous la forme matricielle A*x <= b et Aeq*x = beq. En d'autres termes, récupérez les variables x du côté gauche des expressions et transformez l'inégalité en forme inférieure ou égale :
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
Pour obtenir une solution plus précise, définissez une tolérance de contrainte de 1e-6. Et pour surveiller la progression du solveur, définissez une fonction de tracé.
options = optimoptions('ga','ConstraintTolerance',1e-6,'PlotFcn', @gaplotbestf);
Résolvez le problème de minimisation.
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq,[],[],[],options)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
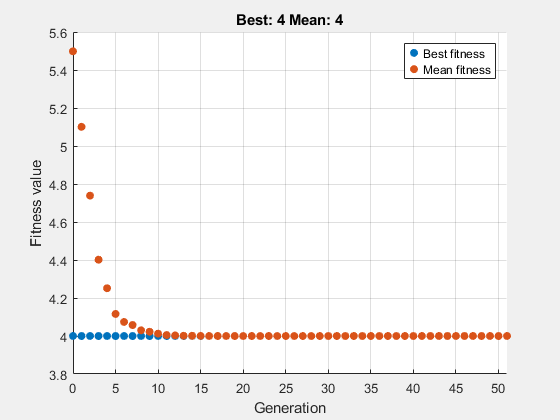
x = 1×2
-2.0000 3.0000
Vérifiez que les contraintes linéaires sont satisfaites à 1e-6 près.
disp(A*x' - b)
9.9809e-07
disp(Aeq*x' - beq)
-7.3589e-08
Utilisez l'algorithme génétique pour minimiser la fonction ps_example sous la contrainte que x(1) est un entier. Cette fonction est incluse lorsque vous exécutez cet exemple.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; x = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon)
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
Utiliser l’algorithme génétique pour minimiser un problème non linéaire contraint par des nombres entiers. Obtenez à la fois l’emplacement du minimum et la valeur minimale de la fonction. La fonction objectif, ps_example, est incluse lorsque vous exécutez cet exemple.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; [x,fval] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon)
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
fval = -1.8344
Comparez ce résultat à la solution du problème sans contraintes.
[x,fval] = ga(fun,2)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-4.6906 -0.0078
fval = -1.9918
Utilisez l'algorithme génétique pour minimiser la fonction ps_example contrainte d'avoir une valeur entière x(1). La fonction ps_example est incluse lorsque vous exécutez cet exemple. Pour comprendre la raison pour laquelle le solveur s'est arrêté et comment ga a recherché un minimum, obtenez les résultats exitflag et output. Tracez également la valeur minimale observée de la fonction objectif à mesure que le solveur progresse.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; options = optimoptions('ga','PlotFcn', @gaplotbestf); [x,fval,exitflag,output] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options)
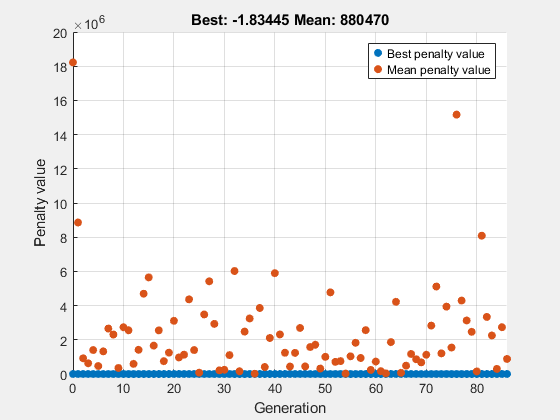
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
fval = -1.8344
exitflag = 1
output = struct with fields:
problemtype: 'integerconstraints'
rngstate: [1x1 struct]
generations: 86
funccount: 3311
message: 'ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and ...'
maxconstraint: 0
hybridflag: []
Utilisez l'algorithme génétique pour minimiser la fonction ps_example contrainte d'avoir une valeur entière x(1). La fonction ps_example est incluse lorsque vous exécutez cet exemple. Obtenir toutes les sorties, y compris la population finale et le vecteur de scores.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; [x,fval,exitflag,output,population,scores] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon);
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
Examinez les 10 premiers membres de la population finale et leurs scores correspondants. Notez que x(1) est une valeur entière pour tous ces membres de la population. L'algorithme entier ga génère uniquement des populations réalisables en nombres entiers.
disp(population(1:10,:))
1.0e+03 *
-0.0050 -0.0001
-0.0050 -0.0001
-1.6420 0.0027
-1.5070 0.0010
-0.4540 0.0104
-0.2530 -0.0011
-0.1210 -0.0003
-0.1040 0.1314
-0.0140 -0.0010
0.0160 -0.0002
disp(scores(1:10))
1.0e+06 *
-0.0000
-0.0000
2.6798
2.2560
0.2016
0.0615
0.0135
0.0099
0.0001
0.0000
Arguments d'entrée
Arguments de sortie
En savoir plus
Conseils
Pour écrire une fonction avec des paramètres supplémentaires aux variables indépendantes qui peuvent être appelées par
ga, voir Passing Extra Parameters.Pour les problèmes qui utilisent le type de population
Double Vector(par défaut),gan'accepte pas les fonctions dont les entrées sont de typecomplex. Pour résoudre des problèmes impliquant des données complexes, écrivez vos fonctions de manière à ce qu'elles acceptent des vecteurs réels, en séparant les parties réelles et imaginaires.
Algorithmes
Pour une description de l'algorithme génétique, voir Comment fonctionne l'algorithme génétique.
Pour une description de l'algorithme de programmation en nombres entiers mixtes, voir Integer ga Algorithm.
Pour une description des algorithmes de contraintes non linéaires, voir Algorithmes de résolution de contraintes non linéaires pour algorithmes génétiques.
Fonctionnalités alternatives
Application
La tâche Optimize du Live Editor fournit une interface visuelle pour ga.
Références
[1] Goldberg, David E., Genetic Algorithms in Search, Optimization & Machine Learning, Addison-Wesley, 1989.
[2] A. R. Conn, N. I. M. Gould, and Ph. L. Toint. “A Globally Convergent Augmented Lagrangian Algorithm for Optimization with General Constraints and Simple Bounds”, SIAM Journal on Numerical Analysis, Volume 28, Number 2, pages 545–572, 1991.
[3] A. R. Conn, N. I. M. Gould, and Ph. L. Toint. “A Globally Convergent Augmented Lagrangian Barrier Algorithm for Optimization with General Inequality Constraints and Simple Bounds”, Mathematics of Computation, Volume 66, Number 217, pages 261–288, 1997.