createParameterBus
Create Simulink bus object and configure Bus Creator block for passing model parameters to Nonlinear MPC Controller block
Description
createParameterBus(
creates a nlmpcobj,nlmpcblk,busName,parameters)Simulink.Bus object, busName, in the
MATLAB® workspace for passing model parameters to a Nonlinear MPC
Controller block, nlmpcblk.
createParameterBus requires you to connect a Bus
Creator block to the Nonlinear MPC Controller block in advance so
that it can configure the Bus Creator block to use the bus object.
Examples
Create a nonlinear MPC controller with four states, two outputs, and one input.
nlobj = nlmpc(4,2,1);
Zero weights are applied to one or more OVs because there are fewer MVs than OVs.
Specify the sample time and horizons of the controller.
Ts = 0.1; nlobj.Ts = Ts; nlobj.PredictionHorizon = 10; nlobj.ControlHorizon = 5;
Specify the state function for the controller, which is in the file pendulumDT0.m. This discrete-time model integrates the continuous-time model defined in pendulumCT0.m using a multistep forward Euler method.
nlobj.Model.StateFcn = "pendulumDT0";
nlobj.Model.IsContinuousTime = false;
The prediction model uses an optional parameter, Ts, to represent the sample time. Specify the number of parameters.
nlobj.Model.NumberOfParameters = 1;
Specify the output function of the model, passing the sample-time parameter as an input argument.
nlobj.Model.OutputFcn = @(x,u,Ts) [x(1); x(3)];
Define standard constraints for the controller.
nlobj.Weights.OutputVariables = [3 3]; nlobj.Weights.ManipulatedVariablesRate = 0.1; nlobj.OV(1).Min = -10; nlobj.OV(1).Max = 10; nlobj.MV.Min = -100; nlobj.MV.Max = 100;
Open the Simulink® model.
mdl = 'mpc_pendcartNMPC';
open_system(mdl)
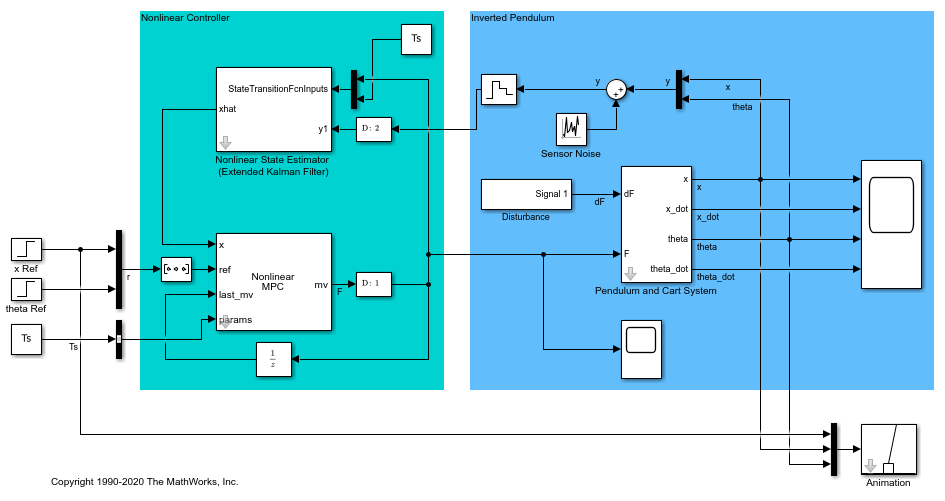
In this model, the Nonlinear MPC Controller block is configured to use the controller nlobj.
To use the optional parameter in the prediction model, the model has a Simulink Bus block connected to the params input port of the Nonlinear MPC Controller block. To configure this bus block to use the Ts parameter, create a Bus object in the MATLAB® workspace, and configure the Bus Creator block to use this object. Name the Bus object 'myBusObject'.
createParameterBus(nlobj,[mdl '/Nonlinear MPC Controller'],'myBusObject',{Ts});
Simulink Bus object "myBusObject" created in the MATLAB Workspace. Bus Creator block "mpc_pendcartNMPC/Nonlinear MPC Controller" is configured to use it.
Input Arguments
Version History
Introduced in R2018b