Coordinate Transformation Conversion
Convertir en une représentation de transformation de coordonnées spécifiée
Bibliothèques :
Robotics System Toolbox /
Utilities
Navigation Toolbox /
Utilities
ROS Toolbox /
Utilities
UAV Toolbox /
Utilities
Description
Le bloc Coordinate Transformation Conversion convertit une transformation de coordonnées de la représentation d'entrée en une représentation de sortie spécifiée. Les représentations d'entrée et de sortie utilisent les formes suivantes :
Axe-Angle (
AxAng) –[x y z theta]Angles d'Euler (
Eul) –[z y x],[z y z]ou[x y z]Transformation homogène (
TForm) – matrice 4 par 4Quaternion (
Quat) –[w x y z]Matrice de rotation (
RotM) – matrice 3 par 3Vecteur de traduction (
TrVec) –[x y z]
Tous les vecteurs doivent être des vecteurs colonnes .
Pour prendre en charge les représentations qui contiennent uniquement des informations de position ou d'orientation (TrVec ou Eul, par exemple), vous pouvez spécifier deux entrées ou sorties pour gérer toutes les informations de transformation. Lorsque vous sélectionnez la transformation homogène comme entrée ou sortie, les paramètres facultatifs Show TrVec input port ou Show TrVec output port peuvent être sélectionnés sur le masque de bloc pour basculer entre les multiples ports.
Exemples
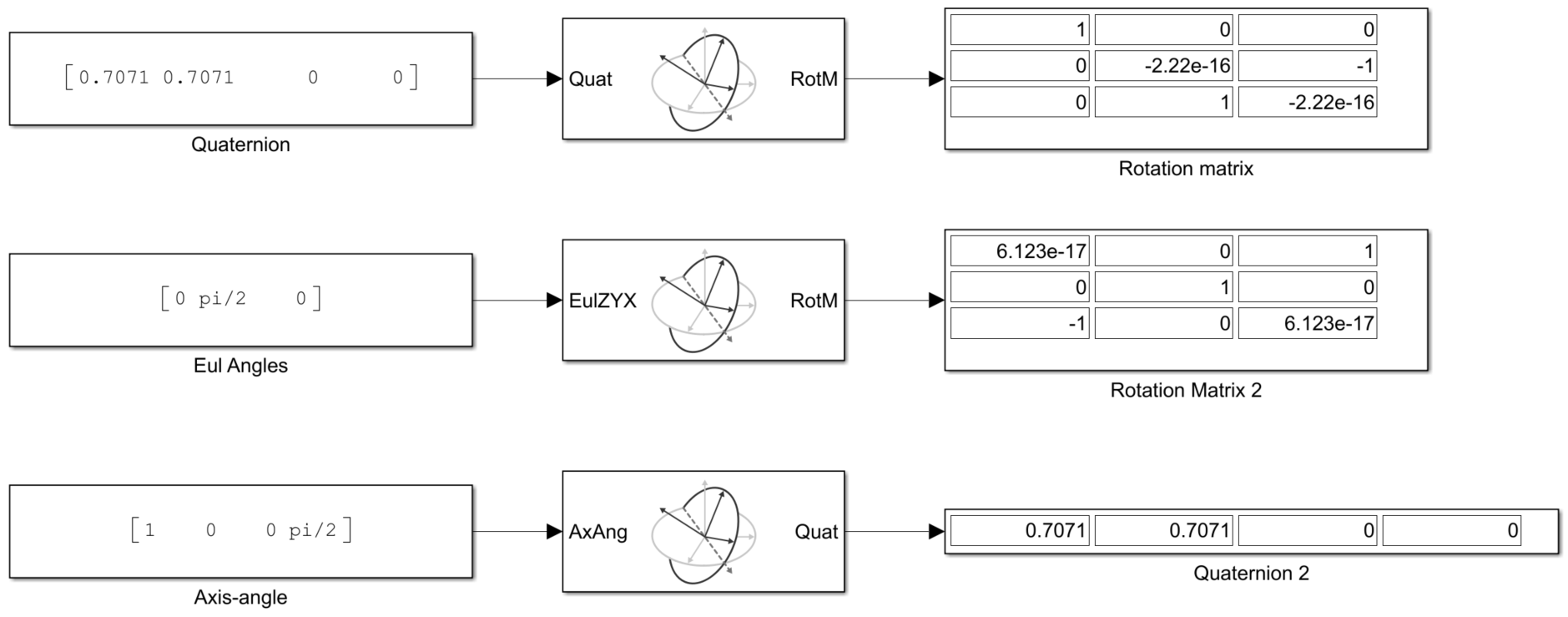
Convert Coordinate System Transformations
How to convert some basic coordinate system transformations into other coordinate systems using Coordinate Transformation Conversion block. Input vectors are expected to be vertical vectors.
Ports
Saisir
Arguments de sortie
Paramètres
Capacités étendues
Historique des versions
Introduit dans R2017b