nodeCovariance
Description
covariance = nodeCovariance(fg,nodeIDs)optimize function
with covariance estimation enabled before you can retrieve the stored node covariances. For
more information about the covariance estimation algorithm and enabling covariance
estimation, see the optimize and
factorGraphSolverOptions object, respectively.
Examples
Create a factor graph with 5 pose nodes. To make it easier to see the change in node state covariance in this example, specify the same information matrix for all factors.
fg = factorGraph; f1 = factorTwoPoseSE2([1 2],Measurement=[2 0 0],Information=[25 0 0; 0 25 0; 0 0 100]); f2 = factorTwoPoseSE2([2 3],Measurement=[2 0 pi/2],Information=[25 0 0; 0 25 0; 0 0 100]); f3 = factorTwoPoseSE2([3 4],Measurement=[2 0 pi/2],Information=[25 0 0; 0 25 0; 0 0 100]); f4 = factorTwoPoseSE2([4 5],Measurement=[2 0 pi/2],Information=[25 0 0; 0 25 0; 0 0 100]); addFactor(fg,f1); addFactor(fg,f2); addFactor(fg,f3); addFactor(fg,f4);
Add a loop closure between the second and fifth nodes using a factor.
f5 = factorTwoPoseSE2([5 2],Measurement=[2 0 pi/2],Information=[25 0 0; 0 25 0; 0 0 100]); addFactor(fg,f5);
Fix the first node and initialize the node states. The first state can stay at default.
fixNode(fg,1) nodeState(fg,2:5,[2 0 0; 4 0 pi/2; 4 2 pi; 2 2 3*pi/2]);
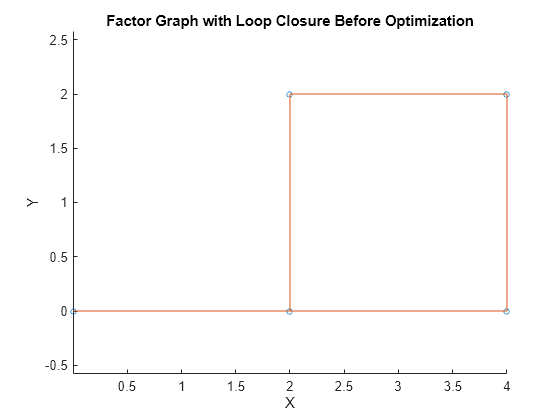
Visualize the factor graph.
show(fg); title("Factor Graph with Loop Closure Before Optimization") axis equal xlabel("X") ylabel("Y") hold on
Create factor graph solver options that indicate to the solver to estimate node state covariance for all types of nodes in the factor graph.
opts = factorGraphSolverOptions(StateCovarianceType="all-types");Optimize the graph with the custom options to estimate and store the node state covariance.
optimize(fg,opts);
Get the node IDs of the SE(2) pose nodes and get their state covariance matrices.
se2nodes = nodeIDs(fg,NodeType="POSE_SE2");
se2Cov = nodeCovariance(fg,se2nodes);Extract the diagonal elements of the state covariance matrices. Note that the state covariance values of the first node are zeros because that node is fixed.
se2Cov2Diag = [diag(se2Cov(:,:,1))';
diag(se2Cov(:,:,2))';
diag(se2Cov(:,:,3))';
diag(se2Cov(:,:,4))';
diag(se2Cov(:,:,5))']se2Cov2Diag = 5×3
0 0 0
0.0400 0.0400 0.0100
0.0720 0.1120 0.0165
0.1380 0.1280 0.0180
0.1300 0.0720 0.0165
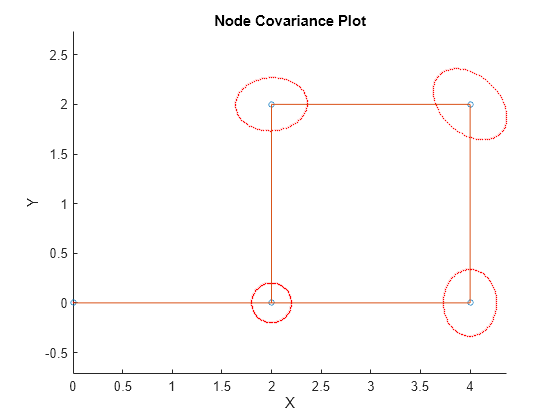
Plot the node state covariances. Note that the plotted covariance increases due to drift accumulation with each consecutive node until node 5, which has a lower covariance due to the additional state information provided by the loop closure.
states = nodeState(fg,se2nodes); exampleHelperPlot2DCovariance(se2Cov,states); title("Node Covariance Plot") axis equal