Localisation et estimation de la pose
Utilisez des algorithmes de localisation et d’estimation de pose pour orienter votre véhicule dans votre environnement. La fusion de capteurs inertiels utilise des filtres pour améliorer et combiner les lectures des capteurs pour l'IMU, le GPS et autres. Les algorithmes de localisation, comme la localisation Monte Carlo et la correspondance par balayage, estiment votre pose sur une carte connue à l'aide d'un capteur de distance ou de lectures lidar. Les graphiques de pose suivent vos poses estimées et peuvent être optimisés en fonction des contraintes de bord et des fermetures de boucles.
Pour modéliser des capteurs spécifiques, voir Modèles de capteurs.
Pour la localisation et le mappage simultanés, voir CLAQUER.
Catégories
- Fusion de capteurs inertiels
Navigation inertielle avec IMU et GPS, fusion de capteurs, réglage de filtre personnalisé
- Algorithmes de localisation
Filtres à particules, scan matching, localisation Monte Carlo, graphiques de pose, odométrie
Sélection d՚exemples
IMU and GPS Fusion for Inertial Navigation
How you might build an IMU + GPS fusion algorithm suitable for unmanned aerial vehicles (UAVs) or quadcopters.

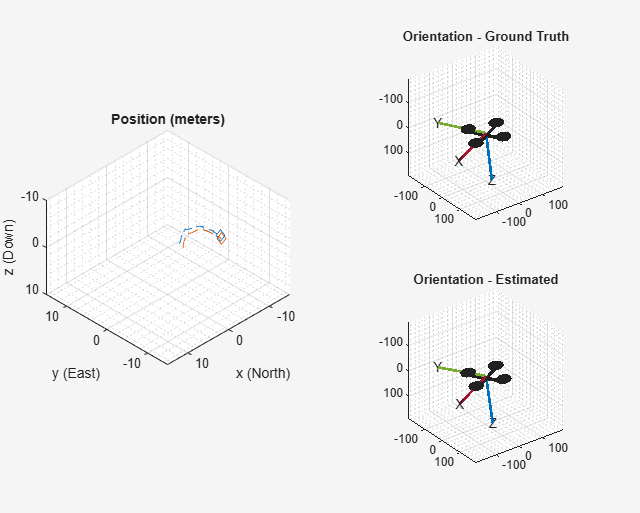
Visual-Inertial Odometry Using Synthetic Data
Estimate the pose (position and orientation) of a ground vehicle using an inertial measurement unit (IMU) and a monocular camera. In this example, you:
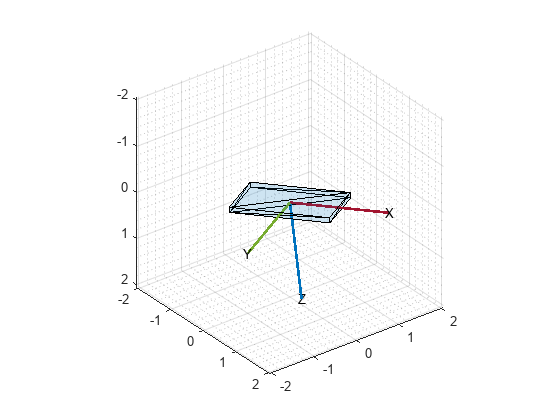
Estimate Phone Orientation Using Sensor Fusion
MATLAB® Mobile™ reports sensor data from the accelerometer, gyroscope, and magnetometer on Apple or Android® mobile devices. Raw data from each sensor or fused orientation data can be obtained. This example shows how to compare the fused orientation data from the phone with the orientation estimate from the ahrsfilter object.

Estimate Position and Orientation of a Ground Vehicle
Estimate the position and orientation of ground vehicles by fusing data from an inertial measurement unit (IMU) and a global positioning system (GPS) receiver.
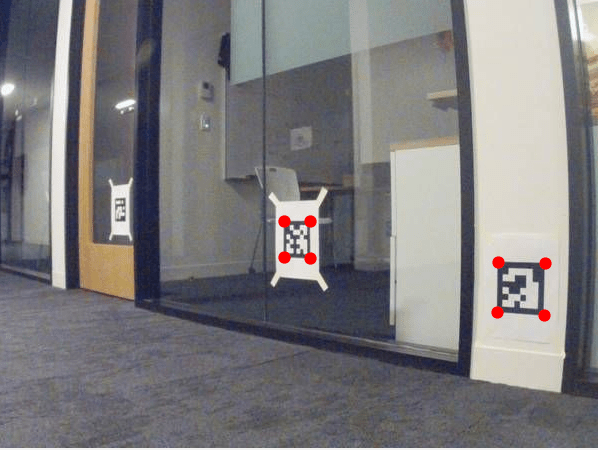
Landmark SLAM Using AprilTag Markers
Combine robot odometry data and AprilTag markers to implement SLAM with a factor graph and pose graph, and compare the results.
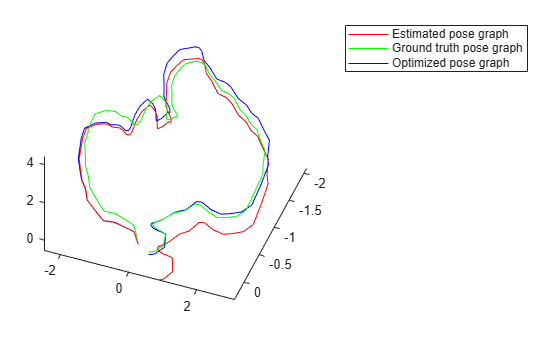
Reduce Drift in 3-D Visual Odometry Trajectory Using Pose Graphs
Reduce the drift in the estimated trajectory (location and orientation) of a monocular camera using 3-D pose graph optimization. Visual odometry estimates the current global pose of the camera (current frame). Because of poor matching or errors in 3-D point triangulation, robot trajectories often tends to drift from the ground truth. Loop closure detection and pose graph optimization reduce this drift and correct for errors.
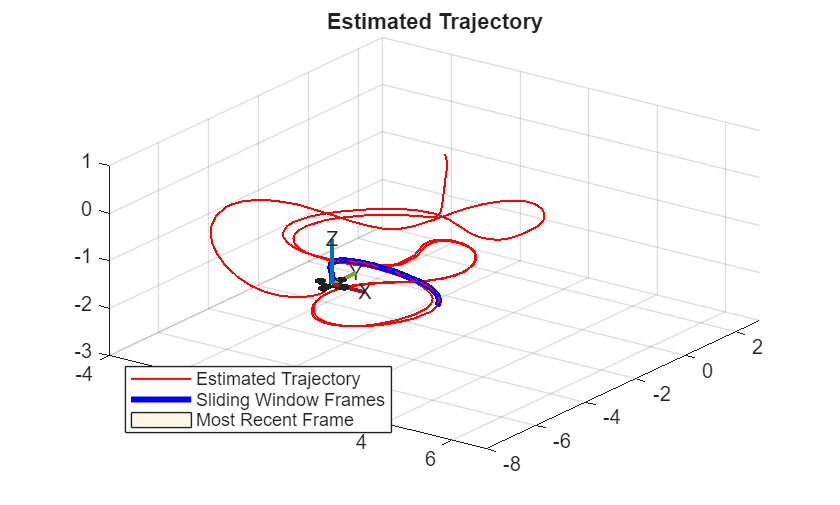
Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Implement monocular visual-inertial odometry to localize a UAV using camera and IMU data, optimized by a factor graph.