tune
Tune insfilterErrorState parameters to reduce estimation
error
Syntax
Description
tunedMeasureNoise = tune(filter,measureNoise,sensorData,groundTruth)insfilterErrorState filter object,
filter, and measurement noises to reduce the root-mean-squared (RMS)
state estimation error between the fused sensor data and the ground truth. The function also
returns the tuned measurement noise, tunedMeasureNoise. The function
uses the property values in the filter and the measurement noise provided in the
measureNoise structure as the initial estimate for the optimization
algorithm.
tunedMeasureNoise = tune(___,config)tunerconfig object,
config.
Examples
Load the recorded sensor data and ground truth data.
load('insfilterErrorStateTuneData.mat');Create tables for the sensor data and the truth data.
sensorData = table(Accelerometer,Gyroscope, ... GPSPosition,GPSVelocity,MVOOrientation, ... MVOPosition); groundTruth = table(Orientation,Position);
Create an insfilterErrorState filter object.
filter = insfilterErrorState('State',initialState, ... 'StateCovariance',initialStateCovariance);
Create a tuner configuration object for the filter. Use the tuner noise function to obtain a set of initial sensor noises used in the filter.
cfg = tunerconfig('insfilterErrorState','MaxIterations',40); measNoise = tunernoise('insfilterErrorState')
measNoise = struct with fields:
MVOOrientationNoise: 1
MVOPositionNoise: 1
GPSPositionNoise: 1
GPSVelocityNoise: 1
Tune the filter and obtain the tuned parameters.
tunedmn = tune(filter,measNoise,sensorData, ...
groundTruth,cfg); Iteration Parameter Metric
_________ _________ ______
1 AccelerometerNoise 4.1291
1 GyroscopeNoise 4.1291
1 AccelerometerBiasNoise 4.1290
1 GyroscopeBiasNoise 4.1290
1 GPSPositionNoise 4.0213
1 GPSVelocityNoise 4.0051
1 MVOPositionNoise 3.9949
1 MVOOrientationNoise 3.9886
2 AccelerometerNoise 3.9886
2 GyroscopeNoise 3.9886
2 AccelerometerBiasNoise 3.9886
2 GyroscopeBiasNoise 3.9886
2 GPSPositionNoise 3.8381
2 GPSVelocityNoise 3.8268
2 MVOPositionNoise 3.8219
2 MVOOrientationNoise 3.8035
3 AccelerometerNoise 3.8035
3 GyroscopeNoise 3.8035
3 AccelerometerBiasNoise 3.8035
3 GyroscopeBiasNoise 3.8035
3 GPSPositionNoise 3.6299
3 GPSVelocityNoise 3.6276
3 MVOPositionNoise 3.6241
3 MVOOrientationNoise 3.5911
4 AccelerometerNoise 3.5911
4 GyroscopeNoise 3.5911
4 AccelerometerBiasNoise 3.5911
4 GyroscopeBiasNoise 3.5911
4 GPSPositionNoise 3.1728
4 GPSVelocityNoise 3.1401
4 MVOPositionNoise 2.7686
4 MVOOrientationNoise 2.6632
5 AccelerometerNoise 2.6632
5 GyroscopeNoise 2.6632
5 AccelerometerBiasNoise 2.6632
5 GyroscopeBiasNoise 2.6632
5 GPSPositionNoise 2.3242
5 GPSVelocityNoise 2.2291
5 MVOPositionNoise 2.2291
5 MVOOrientationNoise 2.0904
6 AccelerometerNoise 2.0903
6 GyroscopeNoise 2.0903
6 AccelerometerBiasNoise 2.0903
6 GyroscopeBiasNoise 2.0903
6 GPSPositionNoise 2.0903
6 GPSVelocityNoise 2.0141
6 MVOPositionNoise 1.9952
6 MVOOrientationNoise 1.8497
7 AccelerometerNoise 1.8497
7 GyroscopeNoise 1.8496
7 AccelerometerBiasNoise 1.8496
7 GyroscopeBiasNoise 1.8496
7 GPSPositionNoise 1.8398
7 GPSVelocityNoise 1.7528
7 MVOPositionNoise 1.7362
7 MVOOrientationNoise 1.5762
8 AccelerometerNoise 1.5762
8 GyroscopeNoise 1.5762
8 AccelerometerBiasNoise 1.5762
8 GyroscopeBiasNoise 1.5762
8 GPSPositionNoise 1.5762
8 GPSVelocityNoise 1.5107
8 MVOPositionNoise 1.4786
8 MVOOrientationNoise 1.3308
9 AccelerometerNoise 1.3308
9 GyroscopeNoise 1.3308
9 AccelerometerBiasNoise 1.3308
9 GyroscopeBiasNoise 1.3308
9 GPSPositionNoise 1.3308
9 GPSVelocityNoise 1.2934
9 MVOPositionNoise 1.2525
9 MVOOrientationNoise 1.1462
10 AccelerometerNoise 1.1462
10 GyroscopeNoise 1.1462
10 AccelerometerBiasNoise 1.1462
10 GyroscopeBiasNoise 1.1462
10 GPSPositionNoise 1.1443
10 GPSVelocityNoise 1.1332
10 MVOPositionNoise 1.0964
10 MVOOrientationNoise 1.0382
11 AccelerometerNoise 1.0382
11 GyroscopeNoise 1.0382
11 AccelerometerBiasNoise 1.0382
11 GyroscopeBiasNoise 1.0382
11 GPSPositionNoise 1.0348
11 GPSVelocityNoise 1.0348
11 MVOPositionNoise 1.0081
11 MVOOrientationNoise 0.9734
12 AccelerometerNoise 0.9734
12 GyroscopeNoise 0.9734
12 AccelerometerBiasNoise 0.9734
12 GyroscopeBiasNoise 0.9734
12 GPSPositionNoise 0.9693
12 GPSVelocityNoise 0.9682
12 MVOPositionNoise 0.9488
12 MVOOrientationNoise 0.9244
13 AccelerometerNoise 0.9244
13 GyroscopeNoise 0.9244
13 AccelerometerBiasNoise 0.9244
13 GyroscopeBiasNoise 0.9244
13 GPSPositionNoise 0.9203
13 GPSVelocityNoise 0.9199
13 MVOPositionNoise 0.9045
13 MVOOrientationNoise 0.8846
14 AccelerometerNoise 0.8846
14 GyroscopeNoise 0.8846
14 AccelerometerBiasNoise 0.8845
14 GyroscopeBiasNoise 0.8845
14 GPSPositionNoise 0.8807
14 GPSVelocityNoise 0.8807
14 MVOPositionNoise 0.8659
14 MVOOrientationNoise 0.8501
15 AccelerometerNoise 0.8501
15 GyroscopeNoise 0.8501
15 AccelerometerBiasNoise 0.8500
15 GyroscopeBiasNoise 0.8500
15 GPSPositionNoise 0.8457
15 GPSVelocityNoise 0.8453
15 MVOPositionNoise 0.8299
15 MVOOrientationNoise 0.8173
16 AccelerometerNoise 0.8173
16 GyroscopeNoise 0.8173
16 AccelerometerBiasNoise 0.8172
16 GyroscopeBiasNoise 0.8172
16 GPSPositionNoise 0.8122
16 GPSVelocityNoise 0.8116
16 MVOPositionNoise 0.7961
16 MVOOrientationNoise 0.7858
17 AccelerometerNoise 0.7858
17 GyroscopeNoise 0.7858
17 AccelerometerBiasNoise 0.7857
17 GyroscopeBiasNoise 0.7857
17 GPSPositionNoise 0.7807
17 GPSVelocityNoise 0.7800
17 MVOPositionNoise 0.7655
17 MVOOrientationNoise 0.7572
18 AccelerometerNoise 0.7572
18 GyroscopeNoise 0.7572
18 AccelerometerBiasNoise 0.7570
18 GyroscopeBiasNoise 0.7570
18 GPSPositionNoise 0.7525
18 GPSVelocityNoise 0.7520
18 MVOPositionNoise 0.7401
18 MVOOrientationNoise 0.7338
19 AccelerometerNoise 0.7337
19 GyroscopeNoise 0.7337
19 AccelerometerBiasNoise 0.7335
19 GyroscopeBiasNoise 0.7335
19 GPSPositionNoise 0.7293
19 GPSVelocityNoise 0.7290
19 MVOPositionNoise 0.7185
19 MVOOrientationNoise 0.7140
20 AccelerometerNoise 0.7138
20 GyroscopeNoise 0.7138
20 AccelerometerBiasNoise 0.7134
20 GyroscopeBiasNoise 0.7134
20 GPSPositionNoise 0.7086
20 GPSVelocityNoise 0.7068
20 MVOPositionNoise 0.6956
20 MVOOrientationNoise 0.6926
21 AccelerometerNoise 0.6922
21 GyroscopeNoise 0.6922
21 AccelerometerBiasNoise 0.6916
21 GyroscopeBiasNoise 0.6916
21 GPSPositionNoise 0.6862
21 GPSVelocityNoise 0.6822
21 MVOPositionNoise 0.6682
21 MVOOrientationNoise 0.6667
22 AccelerometerNoise 0.6660
22 GyroscopeNoise 0.6660
22 AccelerometerBiasNoise 0.6650
22 GyroscopeBiasNoise 0.6650
22 GPSPositionNoise 0.6605
22 GPSVelocityNoise 0.6541
22 MVOPositionNoise 0.6372
22 MVOOrientationNoise 0.6368
23 AccelerometerNoise 0.6356
23 GyroscopeNoise 0.6356
23 AccelerometerBiasNoise 0.6344
23 GyroscopeBiasNoise 0.6344
23 GPSPositionNoise 0.6324
23 GPSVelocityNoise 0.6252
23 MVOPositionNoise 0.6087
23 MVOOrientationNoise 0.6087
24 AccelerometerNoise 0.6075
24 GyroscopeNoise 0.6075
24 AccelerometerBiasNoise 0.6068
24 GyroscopeBiasNoise 0.6068
24 GPSPositionNoise 0.6061
24 GPSVelocityNoise 0.6032
24 MVOPositionNoise 0.6032
24 MVOOrientationNoise 0.6032
25 AccelerometerNoise 0.6017
25 GyroscopeNoise 0.6017
25 AccelerometerBiasNoise 0.6012
25 GyroscopeBiasNoise 0.6012
25 GPSPositionNoise 0.6010
25 GPSVelocityNoise 0.6005
25 MVOPositionNoise 0.6005
25 MVOOrientationNoise 0.6005
26 AccelerometerNoise 0.5992
26 GyroscopeNoise 0.5992
26 AccelerometerBiasNoise 0.5987
26 GyroscopeBiasNoise 0.5987
26 GPSPositionNoise 0.5983
26 GPSVelocityNoise 0.5983
26 MVOPositionNoise 0.5983
26 MVOOrientationNoise 0.5983
27 AccelerometerNoise 0.5975
27 GyroscopeNoise 0.5975
27 AccelerometerBiasNoise 0.5974
27 GyroscopeBiasNoise 0.5974
27 GPSPositionNoise 0.5973
27 GPSVelocityNoise 0.5972
27 MVOPositionNoise 0.5971
27 MVOOrientationNoise 0.5971
28 AccelerometerNoise 0.5971
28 GyroscopeNoise 0.5971
28 AccelerometerBiasNoise 0.5970
28 GyroscopeBiasNoise 0.5970
28 GPSPositionNoise 0.5970
28 GPSVelocityNoise 0.5970
28 MVOPositionNoise 0.5970
28 MVOOrientationNoise 0.5970
29 AccelerometerNoise 0.5970
29 GyroscopeNoise 0.5970
29 AccelerometerBiasNoise 0.5970
29 GyroscopeBiasNoise 0.5970
29 GPSPositionNoise 0.5970
29 GPSVelocityNoise 0.5970
29 MVOPositionNoise 0.5970
29 MVOOrientationNoise 0.5970
30 AccelerometerNoise 0.5969
30 GyroscopeNoise 0.5969
30 AccelerometerBiasNoise 0.5969
30 GyroscopeBiasNoise 0.5969
30 GPSPositionNoise 0.5969
30 GPSVelocityNoise 0.5969
30 MVOPositionNoise 0.5968
30 MVOOrientationNoise 0.5968
31 AccelerometerNoise 0.5968
31 GyroscopeNoise 0.5968
31 AccelerometerBiasNoise 0.5968
31 GyroscopeBiasNoise 0.5968
31 GPSPositionNoise 0.5968
31 GPSVelocityNoise 0.5968
31 MVOPositionNoise 0.5967
31 MVOOrientationNoise 0.5967
32 AccelerometerNoise 0.5967
32 GyroscopeNoise 0.5967
32 AccelerometerBiasNoise 0.5967
32 GyroscopeBiasNoise 0.5967
32 GPSPositionNoise 0.5967
32 GPSVelocityNoise 0.5967
32 MVOPositionNoise 0.5966
32 MVOOrientationNoise 0.5966
33 AccelerometerNoise 0.5966
33 GyroscopeNoise 0.5966
33 AccelerometerBiasNoise 0.5966
33 GyroscopeBiasNoise 0.5966
33 GPSPositionNoise 0.5966
33 GPSVelocityNoise 0.5966
33 MVOPositionNoise 0.5965
33 MVOOrientationNoise 0.5965
34 AccelerometerNoise 0.5965
34 GyroscopeNoise 0.5965
34 AccelerometerBiasNoise 0.5965
34 GyroscopeBiasNoise 0.5965
34 GPSPositionNoise 0.5965
34 GPSVelocityNoise 0.5964
34 MVOPositionNoise 0.5964
34 MVOOrientationNoise 0.5964
35 AccelerometerNoise 0.5964
35 GyroscopeNoise 0.5964
35 AccelerometerBiasNoise 0.5963
35 GyroscopeBiasNoise 0.5963
35 GPSPositionNoise 0.5963
35 GPSVelocityNoise 0.5963
35 MVOPositionNoise 0.5963
35 MVOOrientationNoise 0.5963
36 AccelerometerNoise 0.5963
36 GyroscopeNoise 0.5963
36 AccelerometerBiasNoise 0.5963
36 GyroscopeBiasNoise 0.5963
36 GPSPositionNoise 0.5963
36 GPSVelocityNoise 0.5963
36 MVOPositionNoise 0.5963
36 MVOOrientationNoise 0.5963
37 AccelerometerNoise 0.5963
37 GyroscopeNoise 0.5963
37 AccelerometerBiasNoise 0.5963
37 GyroscopeBiasNoise 0.5963
37 GPSPositionNoise 0.5962
37 GPSVelocityNoise 0.5962
37 MVOPositionNoise 0.5962
37 MVOOrientationNoise 0.5962
38 AccelerometerNoise 0.5962
38 GyroscopeNoise 0.5962
38 AccelerometerBiasNoise 0.5962
38 GyroscopeBiasNoise 0.5962
38 GPSPositionNoise 0.5962
38 GPSVelocityNoise 0.5961
38 MVOPositionNoise 0.5961
38 MVOOrientationNoise 0.5961
39 AccelerometerNoise 0.5961
39 GyroscopeNoise 0.5961
39 AccelerometerBiasNoise 0.5961
39 GyroscopeBiasNoise 0.5961
39 GPSPositionNoise 0.5961
39 GPSVelocityNoise 0.5960
39 MVOPositionNoise 0.5960
39 MVOOrientationNoise 0.5960
40 AccelerometerNoise 0.5960
40 GyroscopeNoise 0.5960
40 AccelerometerBiasNoise 0.5960
40 GyroscopeBiasNoise 0.5960
40 GPSPositionNoise 0.5960
40 GPSVelocityNoise 0.5959
40 MVOPositionNoise 0.5959
40 MVOOrientationNoise 0.5959
Fuse the sensor data using the tuned filter.
N = size(sensorData,1); qEstTuned = quaternion.zeros(N,1); posEstTuned = zeros(N,3); for ii=1:N predict(filter, Accelerometer(ii,:),Gyroscope(ii,:)); if all(~isnan(GPSPosition(ii,1))) fusegps(filter,GPSPosition(ii,:), ... tunedmn.GPSPositionNoise,GPSVelocity(ii,:), ... tunedmn.GPSVelocityNoise); end if all(~isnan(MVOPosition(ii,1))) fusemvo(filter,MVOPosition(ii,:),tunedmn.MVOPositionNoise, ... MVOOrientation{ii},tunedmn.MVOOrientationNoise); end [posEstTuned(ii,:),qEstTuned(ii,:)] = pose(filter); end
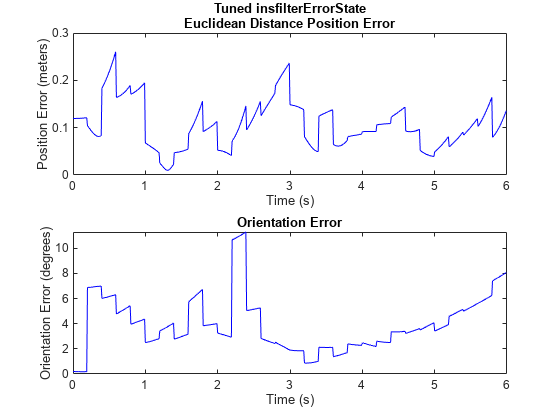
Compute the RMS errors.
orientationErrorTuned = rad2deg(dist(qEstTuned,Orientation)); rmsOrientationErrorTuned = sqrt(mean(orientationErrorTuned.^2))
rmsOrientationErrorTuned = 4.4999
positionErrorTuned = sqrt(sum((posEstTuned - Position).^2,2)); rmsPositionErrorTuned = sqrt(mean( positionErrorTuned.^2))
rmsPositionErrorTuned = 0.1172
Visualize the results.
figure; t = (0:N-1)./filter.IMUSampleRate; subplot(2,1,1) plot(t, positionErrorTuned,'b'); title("Tuned insfilterErrorState" + newline + ... "Euclidean Distance Position Error") xlabel('Time (s)'); ylabel('Position Error (meters)') subplot(2,1,2) plot(t, orientationErrorTuned,'b'); title("Orientation Error") xlabel('Time (s)'); ylabel('Orientation Error (degrees)');
Input Arguments
Output Arguments
References
[1] Abbeel, P., Coates, A., Montemerlo, M., Ng, A.Y. and Thrun, S. Discriminative Training of Kalman Filters. In Robotics: Science and systems, Vol. 2, pp. 1, 2005.
Version History
Introduced in R2021a