quaternion
Créer un tableau de quaternions
Description
Un quaternion est un nombre hyper-complexe en quatre parties utilisé dans les rotations et orientations tridimensionnelles.
Un nombre de quaternion est représenté sous la forme , où a, b, c et Les parties d sont des nombres réels, et i, j et k sont les éléments de base, satisfaisant l'équation : i2 = j2 = k2 = ijk = −1.
L'ensemble des quaternions, noté H, est défini dans un espace vectoriel à quatre dimensions sur les nombres réels, R4. Chaque élément de H a une représentation unique basée sur une combinaison linéaire des éléments de base i, j et k.
Toutes les rotations en 3D peuvent être décrites par un axe de rotation et un angle autour de cet axe. Un avantage des quaternions par rapport aux matrices de rotation est que l'axe et l'angle de rotation sont faciles à interpréter. Par exemple, considérons un point dans R3. Pour faire pivoter le point, vous définissez un axe de rotation et un angle de rotation.
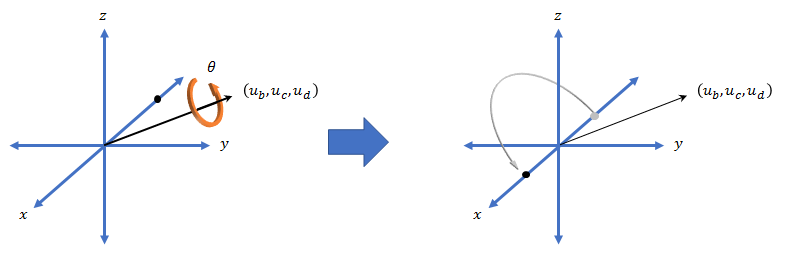
La représentation quaternion de la rotation peut être exprimée par , où θ est l'angle de rotation et [ub, uc, et ud] est l'axe de rotation.
Création
Syntaxe
Description
quat = quaternion()
quat = quaternion(A,B,C,D)A, B, C et D. Toutes les entrées doivent avoir la même taille et être du même type de données.
quat = quaternion(matrix)
quat = quaternion(RV,"rotvec")RV. Chaque ligne de RV représente un vecteur de rotation en radians.
quat = quaternion(RV,"rotvecd")RV. Chaque ligne de RV représente un vecteur de rotation en degrés.
quat = quaternion(transformation)transformation.
quat = quaternion(rotation)rotation.
Arguments en entrée
Parties d'un quaternion, spécifiées sous forme de quatre scalaires, matrices ou tableaux multidimensionnels de même taille, séparés par des virgules.
Exemple : quat = quaternion(1,2,3,4) crée un quaternion de la forme 1 + 2i + 3j + 4k.
Exemple : quat = quaternion([1,5],[2,6],[3,7],[4,8]) crée un tableau de quaternions 1 par 2 où quat(1,1) = 1 + 2i + 3j + 4k et quat(1,2) = 5 + 6i + 7j + 8k
Types de données : single | double
Matrice de parties de quaternions, spécifiée comme une matrice N-by-4. Chaque ligne représente un quaternion distinct. Chaque colonne représente une partie de quaternion distincte.
Exemple : quat = quaternion(rand(10,4)) crée un tableau de quaternions 10 par 1.
Types de données : single | double
Matrice de vecteurs de rotation, spécifiée comme une matrice N-by-3. Chaque ligne de RV représente les éléments [XYZ] d'un vecteur de rotation. Un vecteur de rotation est un vecteur unitaire représentant l'axe de rotation mis à l'échelle par l'angle de rotation en radians ou en degrés.
Pour utiliser cette syntaxe, spécifiez le premier argument comme une matrice de vecteurs de rotation et le deuxième argument comme "rotvec" ou "rotvecd".
Exemple : quat = quaternion(rand(10,3),"rotvec") crée un tableau de quaternions 10 par 1.
Types de données : single | double
Tableau de matrices de rotation, spécifié par une matrice 3 par 3 ou un tableau 3 par 3 par N . Chaque page du tableau représente une matrice de rotation distincte.
Exemple : quat = quaternion(rand(3),"rotmat","point")
Exemple : quat = quaternion(rand(3),"rotmat","frame")
Types de données : single | double
Type de matrice de rotation, spécifié par "point" ou "frame".
Exemple : quat = quaternion(rand(3),"rotmat","point")
Exemple : quat = quaternion(rand(3),"rotmat","frame")
Types de données : char | string
Matrice d'angles d'Euler, spécifiée par une matrice N-by-3. Si vous utilisez la syntaxe "euler" , spécifiez E en radians. Si vous utilisez la syntaxe "eulerd" , spécifiez E en degrés.
Exemple : quat = quaternion(E,"euler","YZY","point")
Exemple : quat = quaternion(E,"euler","XYZ","frame")
Types de données : single | double
Séquence de rotation, spécifiée comme vecteur de caractères à trois éléments :
"YZY""YXY""ZYZ""ZXZ""XYX""XZX""XYZ""YZX""ZXY""XZY""ZYX""YXZ"
Supposons que vous souhaitiez déterminer les nouvelles coordonnées d’un point lorsque son système de coordonnées subit une rotation à l’aide de la rotation du cadre. Le point est défini dans le système de coordonnées d'origine comme :
point = [sqrt(2)/2,sqrt(2)/2,0];
Vous souhaitez faire pivoter le point en utilisant la représentation angulaire d'Euler [45,45,0]. Faites pivoter le point en utilisant deux séquences de rotation différentes :
Si vous créez un rotateur de quaternion et spécifiez la séquence "ZYX", le cadre pivote d'abord de 45° autour de l'axe z, puis de 45° autour du nouveau y.-axe.
quatRotator = quaternion([45,45,0],"eulerd","ZYX","frame"); newPointCoordinate = rotateframe(quatRotator,point)
newPointCoordinate = 0.7071 -0.0000 0.7071
Si vous créez un rotateur de quaternion et spécifiez la séquence "YZX", le cadre pivote d'abord de 45° autour de l'axe y, puis de 45° autour du nouveau z.-axe.
quatRotator = quaternion([45,45,0],"eulerd","YZX","frame"); newPointCoordinate = rotateframe(quatRotator,point)
newPointCoordinate = 0.8536 0.1464 0.5000
Types de données : char | string
Transformation, spécifiée comme un objet se3 , ou comme un tableau d'éléments N d'objets se3 . N est le nombre total de transformations.
L'objet quaternion ignore la composante de translation de la transformation et convertit la sous-matrice de rotation 3 par 3 de la transformation en quaternion.
Rotation orthonormale, spécifiée comme un objet so3 , ou comme un tableau d'éléments N d'objets so3 . N est le nombre total de rotations.
Fonctions d'objet
angvel | Vitesse angulaire du réseau de quaternions |
classUnderlying | Class of parts within quaternion |
compact | Convertir le tableau de quaternions en matrice N-by-4 |
conj | Complex conjugate of quaternion |
' | Transposition conjuguée complexe d'un tableau de quaternions |
dist | Distance angulaire en radians |
euler | Convertir un quaternion en angles d'Euler (radians) |
eulerd | Convertir un quaternion en angles d'Euler (degrés) |
exp | Exponential of quaternion array |
.\,ldivide | Element-wise quaternion left division |
log | Logarithme népérien du tableau de quaternions |
meanrot | Rotation moyenne des quaternions |
- | Soustraction de quaternions |
* | Multiplication des quaternions |
norm | Norme du quaternion |
normalize | Normalisation des quaternions |
ones | Créer un tableau de quaternions avec des parties réelles définies sur un et des parties imaginaires définies sur zéro |
parts | Extraire des parties de quaternion |
.^,power | Puissance des quaternions par éléments |
prod | Produit d'un tableau de quaternions |
randrot | Uniformly distributed random rotations |
./,rdivide | Element-wise quaternion right division |
rotateframe | Quaternion frame rotation |
rotatepoint | Rotation des points de quaternion |
rotmat | Convertir le quaternion en matrice de rotation |
rotvec | Convert quaternion to rotation vector (radians) |
rotvecd | Convert quaternion to rotation vector (degrees) |
slerp | Interpolation linéaire sphérique |
.*,times | Multiplication de quaternions par éléments |
' | Transposer le tableau de quaternions |
- | Quaternion unaire moins |
zeros | Créer un tableau de quaternions avec toutes les parties mises à zéro |
Exemples
Capacités étendues
Historique des versions
Introduit dans R2019b