addScan
Ajouter une analyse à la carte lidar SLAM
Syntaxe
Description
addScan( ajoute une analyse lidar, slamObj,currScan)currScan, à l'objet lidar SLAM, slamObj. La fonction utilise la correspondance de scan pour corréler ce scan au plus récent, puis l'ajoute au graphique de pose défini dans slamObj. Si l'analyse est acceptée, addScan détecte les fermetures de boucle et optimise en fonction des paramètres de slamObj.
addScan( spécifie également une pose relative par rapport à la dernière pose d'analyse lidar dans slamObj,currScan,relPoseEst)slamObj. Cette pose relative améliore la correspondance du scan.
Remarque
L'entrée relPoseEst est ignorée lorsque la propriété ScanRegistrationMethod de l'objet lidarSLAM est définie sur 'PhaseCorrelation'.
[ affiche des informations détaillées sur l'ajout de l'analyse à l'objet SLAM. isAccepted,loopClosureInfo,optimInfo] = addScan(___)isAccepted indique si l'analyse est ajoutée ou rejetée. loopClosureInfo et optimInfo indiquent si une fermeture de boucle est détectée ou si le graphique de pose est optimisé.
Exemples
Utilisez un objet lidarSLAM pour ajouter et comparer de manière itérative des analyses lidar et créer un graphique de pose optimisé de la trajectoire du robot. Pour obtenir une carte d'occupation à partir des poses et scans associés, utilisez la fonction buildMap .
Charger des données et configurer l'algorithme SLAM
Chargez un cell array d'objets lidarScan . Les scans lidar ont été collectés dans un parking sur un robot Husky® de ClearPath Robotics®. En règle générale, les analyses lidar sont effectuées à haute fréquence et chaque analyse n'est pas nécessaire pour le SLAM. Par conséquent, sous-échantillonnez les analyses en sélectionnant uniquement toutes les 40 analyses.
load garage_fl1_southend.mat scans scans = scans(1:40:end);
Pour configurer l'algorithme SLAM, spécifiez la plage lidar, la résolution de la carte, le seuil de fermeture de boucle et le rayon de recherche. Ajustez ces paramètres pour votre robot et votre environnement spécifiques. Créez l'objet lidarSLAM avec ces paramètres.
maxRange = 19.2; % meters resolution = 10; % cells per meter slamObj = lidarSLAM(resolution,maxRange); slamObj.LoopClosureThreshold = 360; slamObj.LoopClosureSearchRadius = 8;
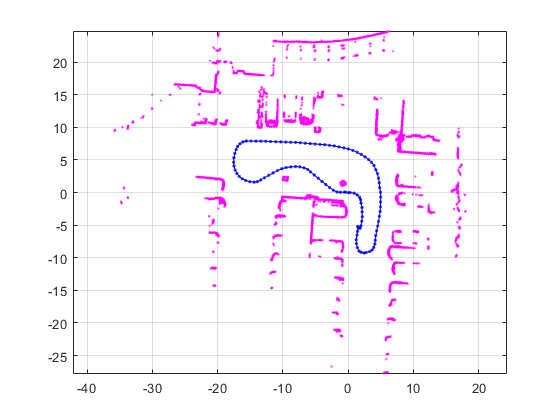
Ajouter des analyses de manière itérative
À l'aide d'une boucle for , ajoutez des analyses à l'objet SLAM. L'objet utilise la correspondance d'analyse pour comparer chaque analyse ajoutée à celles ajoutées précédemment. Pour améliorer la carte, l'objet optimise le graphique de pose chaque fois qu'il détecte une fermeture de boucle. Tous les 10 scans, affichez les poses et les scans stockés.
for i = 1:numel(scans) addScan(slamObj,scans{i}); if rem(i,10) == 0 show(slamObj); end end
Voir la carte d'occupation
Après avoir ajouté tous les scans à l'objet SLAM, créez une carte occupancyMap en appelant buildMap avec les scans et les poses. Utilisez la même résolution de carte et la même portée maximale que celles utilisées avec l'objet SLAM.
[scansSLAM,poses] = scansAndPoses(slamObj);
occMap = buildMap(scansSLAM,poses,resolution,maxRange);
figure
show(occMap)
title('Occupancy Map of Garage')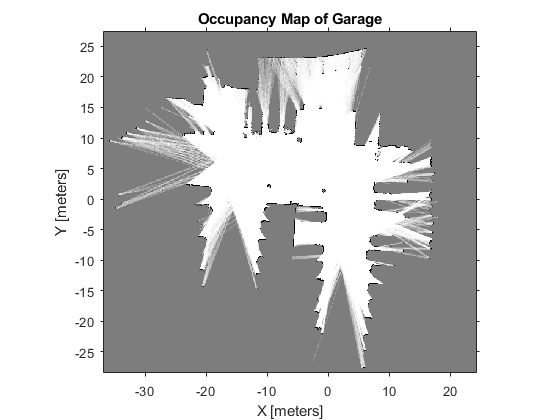
Arguments d'entrée
Arguments de sortie
Capacités étendues
Historique des versions
Introduit dans R2019b