SLAM
La localisation et la cartographie simultanées (SLAM) utilisent à la fois les algorithmes Cartographie et pour construire une carte et localiser votre véhicule sur cette carte en même temps. Utilisez lidarSLAM pour optimiser votre propre algorithme SLAM qui traite les scans lidar et les estimations de pose odométriques pour construire une carte de manière itérative. Utilisez buildMap pour prendre des données enregistrées et filtrées afin de créer une carte à l'aide de SLAM. L'application SLAM Map Builder vous permet de modifier manuellement les poses relatives et d'aligner les scans pour améliorer la précision de votre carte.
Pour plus d'informations sur ce qu'est le SLAM et sur d'autres outils SLAM dans d'autres toolboxes MATLAB®, voir Introduction à la méthode SLAM.
Applications
| SLAM Map Builder | Créez des cartes quadrillées 2D à l'aide du SLAM basé sur lidar |
Fonctions
Rubriques
- Choose SLAM Workflow Based on Sensor Data
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features.
- Factor Graph for SLAM
Learn about factor graph and how it use it for SLAM applications.
Sélection d՚exemples

Performant and Deployable Monocular Visual SLAM
Visual simultaneous localization and mapping (vSLAM) refers to the process of calculating the position and orientation of a camera with respect to its surroundings while simultaneously mapping the environment. Applications for vSLAM include augmented reality, robotics, and autonomous driving. In this example, the algorithm uses only visual inputs from the camera.

Build a Map from Lidar Data Using SLAM
Process 3-D lidar data from a sensor on a vehicle to progressively build a map and estimate the trajectory using SLAM.
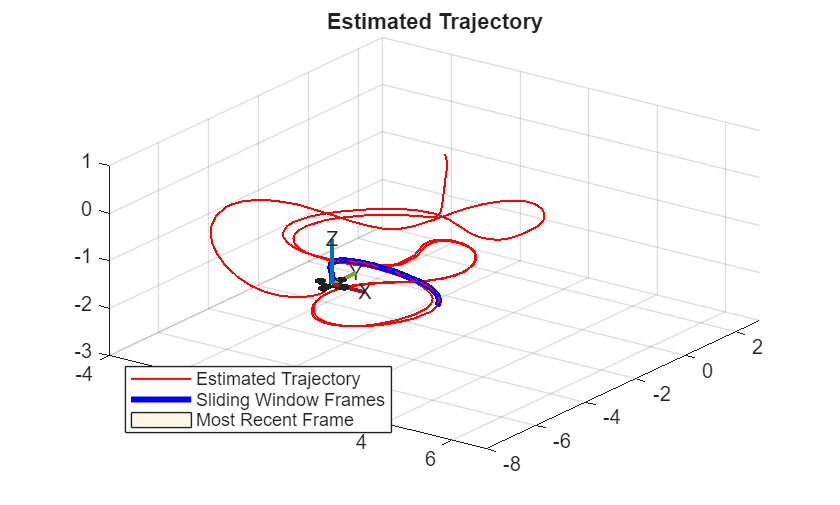
Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Implement monocular visual-inertial odometry to localize a UAV using camera and IMU data, optimized by a factor graph.

Factor Graph-Based Pedestrian Localization with IMU and GPS Sensors
Estimate the position of a pedestrian using logged sensor data from an inertial measurement unit (IMU) and Global Positioning System (GPS) receiver and a factor graph.
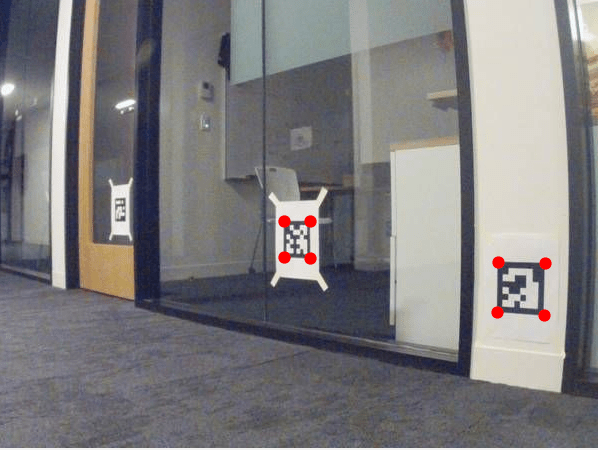
Landmark SLAM Using AprilTag Markers
Combine robot odometry data and AprilTag markers to implement SLAM with a factor graph and pose graph, and compare the results.

Map Indoor Area Using Lidar SLAM and Factor Graph
Implement offline lidar SLAM on collected lidar scans to map an indoor area using a factor graph and lidar scan map.

Build and Deploy Visual SLAM Algorithm with ROS in MATLAB
Implement a monocular visual SLAM algorithm to estimate camera poses and deploy generated C++ code using ROS.

Simulate RGB-D Visual SLAM System with Cosimulation in Gazebo and Simulink
Use RGB and depth images from a robot to simulate a RGB-D visual SLAM system in Simulink.

EKF-Based Landmark SLAM
Implement landmark SLAM using the Extended Kalman Filter algorithm to track the path of a vehicle and map the surroundings.
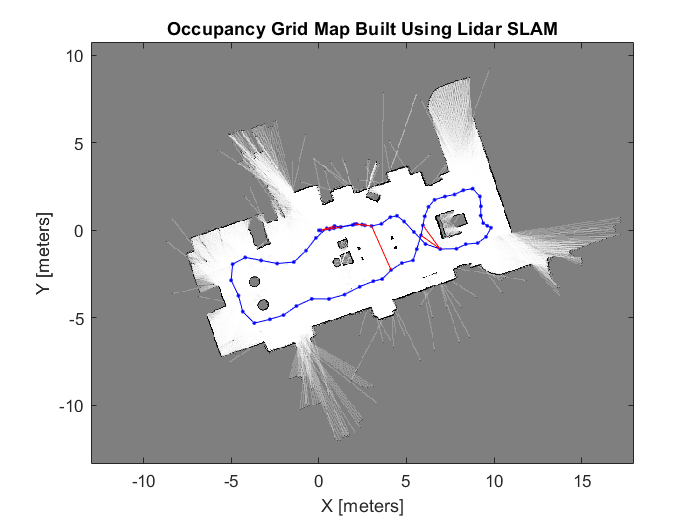
Implement Simultaneous Localization And Mapping (SLAM) with Lidar Scans
Implement offline SLAM using a pose graph and a collection series of lidar scans, and build a map of the environment.