optimizePoseGraph
Optimiser les nœuds dans le graphique de pose
Syntaxe
Description
updatedGraph = optimizePoseGraph(poseGraph)
Cette optimisation du graphe de pose suppose que toutes les contraintes de bord et les fermetures de boucles sont valides. Pour envisager de couper les bords en fonction de mauvaises fermetures de boucles, consultez la fonction trimLoopClosures .
updatedGraph = optimizePoseGraph(poseGraph,solver)
[ renvoie des statistiques supplémentaires sur le processus d'optimisation dans updatedGraph,solutionInfo] = optimizePoseGraph(___)solutionInfo en utilisant l'une des syntaxes précédentes.
[___] = optimizePoseGraph(___, spécifie des options supplémentaires en utilisant une ou plusieurs paires Name,Value)Name,Value . Par exemple, 'MaxIterations',1000 augmente le nombre maximum d’itérations à 1 000.
Exemples
Optimisez un graphique de pose en fonction des nœuds et des contraintes de bord. Le graphique de pose utilisé dans cet exemple est tiré du MIT Dataset et a été généré à partir des informations extraites d'un parking.
Chargez le graphique de pose à partir de l'ensemble de données MIT. Inspectez l'objet poseGraph3D pour afficher le nombre de nœuds et de fermetures de boucle.
load parking-garage-posegraph.mat pg disp(pg);
poseGraph3D with properties:
NumNodes: 1661
NumEdges: 6275
NumLoopClosureEdges: 4615
LoopClosureEdgeIDs: [128 129 130 132 133 134 135 137 138 139 140 142 143 144 146 147 148 150 151 204 205 207 208 209 211 212 213 215 216 217 218 220 221 222 223 225 226 227 228 230 231 232 233 235 236 237 238 240 241 242 243 244 ... ] (1x4615 double)
LandmarkNodeIDs: [1x0 double]
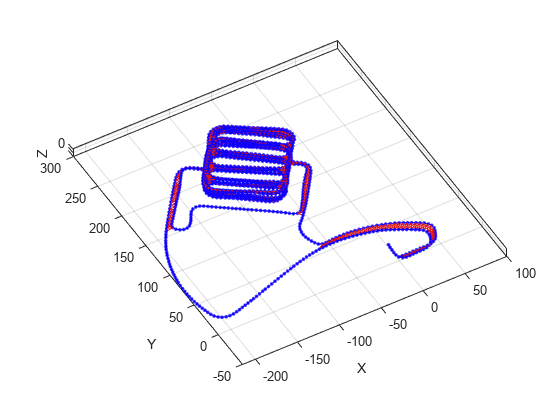
Tracez le graphique de pose sans les identifiants. Les lignes rouges indiquent les fermetures de boucles identifiées dans l'ensemble de données.
title('Original Pose Graph') show(pg,'IDs','off'); view(-30,45)
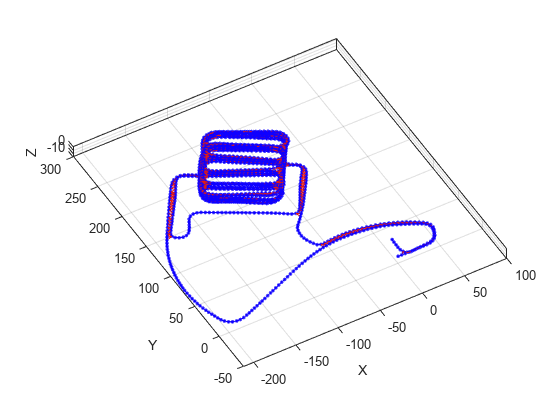
Optimisez le graphique de pose. Les nœuds sont ajustés en fonction des contraintes de bord et des fermetures de boucles. Tracez le graphique de pose optimisé pour voir l'ajustement des nœuds avec des fermetures de boucle.
updatedPG = optimizePoseGraph(pg); figure title('Updated Pose Graph') show(updatedPG,'IDs','off'); view(-30,45)
Arguments d'entrée
Arguments nom-valeur
Arguments de sortie
Références
[1] Grisetti, G., R. Kummerle, C. Stachniss, and W. Burgard. "A Tutorial on Graph-Based SLAM." IEEE Intelligent Transportation Systems Magazine. Vol. 2, No. 4, 2010, pp. 31–43. doi:10.1109/mits.2010.939925.
[2] Carlone, Luca, Roberto Tron, Kostas Daniilidis, and Frank Dellaert. "Initialization Techniques for 3D SLAM: a Survey on Rotation Estimation and its Use in Pose Graph Optimization." 2015 IEEE International Conference on Robotics and Automation (ICRA). 2015, pp. 4597–4604.
Capacités étendues
Historique des versions
Introduit dans R2019b
Voir aussi
Fonctions
trimLoopClosures|addRelativePose|removeEdges|edgeNodePairs|edgeConstraints|findEdgeID|nodeEstimates