matchScansGrid
Estimer la pose entre deux analyses lidar à l'aide d'une recherche basée sur une grille
Syntaxe
Description
pose = matchScansGrid(currScan,refScan)lidarScan et un objet lidarScan actuel à l'aide d'une recherche basée sur une grille. matchScansGrid convertit les paires de scans lidar en grilles probabilistes et trouve la pose entre les deux scans en corrélant leurs grilles. La fonction utilise une stratégie de branchement et de liaison pour accélérer le calcul sur de grandes fenêtres de recherche discrétisées.
[___] = matchScansGrid(___,Name,Value) spécifie les options utilisant un ou plusieurs arguments de paire Name,Value . Par exemple, 'InitialPose',[1 1 pi/2] spécifie une estimation de pose initiale pour la correspondance de numérisation.
Exemples
Effectuez une correspondance de numérisation à l’aide d’une recherche basée sur une grille pour estimer la pose entre deux numérisations laser. Générez une grille probabiliste à partir des scans et estimez la différence de pose à partir de ces grilles.
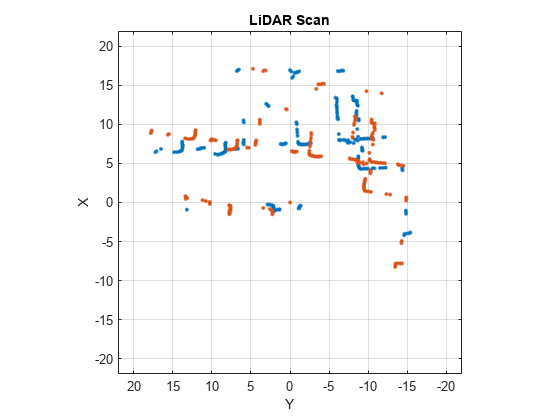
Chargez les données de numérisation laser. Ces deux analyses proviennent d'un véritable capteur lidar avec des changements dans la pose du robot et sont stockées sous forme d'objets lidarScan .
load laserScans.mat scan scan2 plot(scan) hold on plot(scan2) hold off
Utilisez matchScansGrid pour estimer la pose entre les deux scans.
relPose = matchScansGrid(scan2,scan);
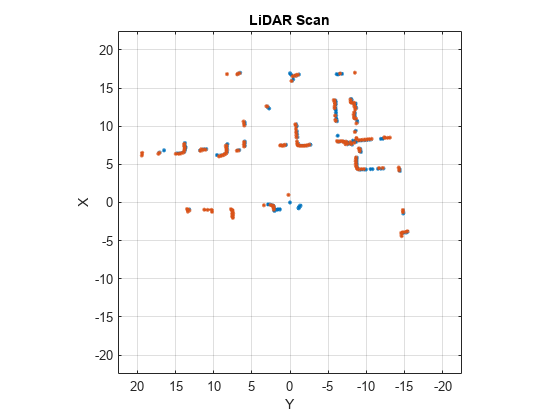
À l’aide de la pose estimée, transformez l’analyse actuelle en analyse de référence. Les analyses se chevauchent étroitement lorsque vous les tracez ensemble.
scan2Tformed = transformScan(scan2,relPose); plot(scan) hold on plot(scan2Tformed) hold off
Arguments d'entrée
Arguments nom-valeur
Arguments de sortie
Références
[1] Hess, Wolfgang, Damon Kohler, Holger Rapp, and Daniel Andor. "Real-Time Loop Closure in 2D LIDAR SLAM." 2016 IEEE International Conference on Robotics and Automation (ICRA). 2016.
Capacités étendues
Historique des versions
Introduit dans R2019b