insertRay
Insérer un rayon à partir d'une observation par balayage laser
Syntaxe
Description
insertRay( insère une ou plusieurs observations de capteur de balayage lidar dans la grille d'occupation, map,pose,scan,maxrange)map, en utilisant l'objet d'entrée lidarScan , scan, pour obtenir les points finaux des rayons. Les extrémités des rayons sont considérées comme de l'espace libre si les plages d'analyse d'entrée sont inférieures à maxrange. Les cellules observées comme occupées sont mises à jour avec une observation de 0,7. Tous les autres points le long du rayon sont traités comme étant sans obstacle et mis à jour avec une observation de 0,4. Les points de terminaison supérieurs à maxrange ne sont pas mis à jour. Les valeurs NaN sont ignorées. Ce comportement est en corrélation avec le modèle de capteur inverse.
insertRay(___, insère des rayons avec des probabilités mises à jour données dans le vecteur à deux éléments, invModel)invModel, qui correspond aux observations sans obstacle et occupées. Utilisez l’une des syntaxes précédentes pour saisir les rayons.
Exemples
Créez une carte de grille d'occupation vide.
map = occupancyMap(10,10,20);
Spécifiez la pose du véhicule, les portées, les angles et la portée maximale du balayage laser.
pose = [5,5,0]; ranges = 3*ones(100,1); angles = linspace(-pi/2,pi/2,100); maxrange = 20;
Créez un objet lidarScan avec les plages et les angles spécifiés.
scan = lidarScan(ranges,angles);
Insérez les données du scanner laser dans la carte d'occupation.
insertRay(map,pose,scan,maxrange);
Affichez la carte pour voir les résultats de l’insertion du balayage laser.
show(map)
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](insertlaserscansintooccupancymapexample_0188cabe52d5520803aed8bf8b16ad5f1e_fr.png)
Vérifiez l'occupation de l'emplacement directement devant le véhicule.
getOccupancy(map,[8 5])
ans = 0.7000
Ajoutez une deuxième lecture et affichez la mise à jour des valeurs d'occupation. La lecture supplémentaire augmente la confiance dans les lectures. Les valeurs libre et occupé deviennent plus distinctes.
insertRay(map,pose,scan,maxrange); show(map)
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](insertlaserscansintooccupancymapexample_02_fr.png)
getOccupancy(map,[8 5])
ans = 0.8448
Arguments d'entrée
En savoir plus
Le modèle de capteur inverse détermine la manière dont les valeurs sont définies le long d'un rayon, depuis la lecture d'un capteur de distance jusqu'aux obstacles sur la carte. Vous pouvez personnaliser ce modèle en spécifiant différentes probabilités pour les emplacements libres et occupés dans l'argument invModel . Les valeurs de plage NaN sont ignorées. Les valeurs de plage supérieures à maxrange ne sont pas mises à jour.
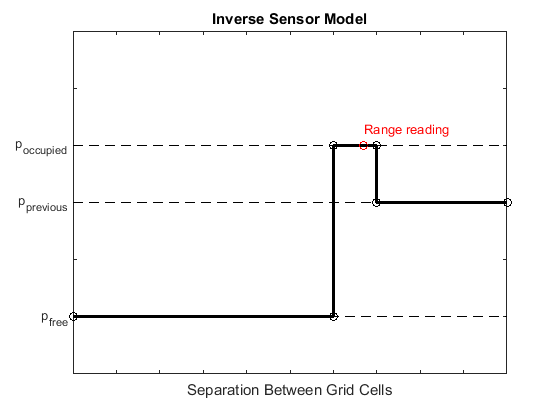
Les emplacements de grille contenant des relevés de plage sont mis à jour avec la probabilité d'occupation. Les emplacements avant la lecture sont mis à jour avec la probabilité gratuite. Tous les emplacements après la lecture ne sont pas mis à jour.
Capacités étendues
Historique des versions
Introduit dans R2019b