dist
Distance angulaire en radians
Syntaxe
Description
distance = dist(quatA,quatB)quatA et quatB.
Exemples
Arguments d'entrée
Arguments de sortie
Algorithmes
La fonction dist renvoie la distance angulaire entre deux quaternions.
Un quaternion peut être défini par un axe (ub,uc,ud) et un angle de rotation θq: .
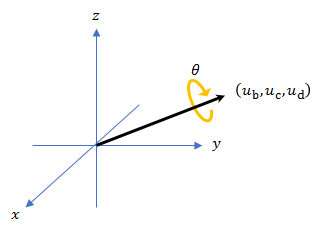
Étant donné un quaternion sous la forme , où a est la partie réelle, vous pouvez résoudre l'angle de q comme .
Considérons deux quaternions, p et q, et le produit . Lorsque p se rapproche de q, l'angle de z passe à 0, et z se rapproche de l'unité. quaternion.
La distance angulaire entre deux quaternions peut être exprimée par .
En utilisant la syntaxe du type de données quaternion , la distance angulaire est calculée comme suit :
angularDistance = 2*acos(abs(parts(p*conj(q))));
Capacités étendues
Historique des versions
Introduit dans R2019b