point de rotation
Rotation des points de quaternion
Description
rotationResult = rotatepoint(quat,cartesianPoints)quat. Les éléments du quaternion sont normalisés avant utilisation dans la rotation.
Exemples
Définir un point en trois dimensions. Les coordonnées d'un point sont toujours spécifiées dans l'ordre x, y, z. Pour une visualisation pratique, définissez le point sur le plan x-y.
x = 0.5; y = 0.5; z = 0; plot(x,y,"ko") hold on axis([-1 1 -1 1])
Créez un vecteur quaternion spécifiant deux rotations distinctes, une pour faire pivoter le point de 45 et une autre pour faire pivoter le point de -90 degrés autour de l'axe z. Utilisez rotatepoint pour effectuer la rotation.
quat = quaternion([0,0,pi/4; ... 0,0,-pi/2],"euler","XYZ","point"); rotatedPoint = rotatepoint(quat,[x,y,z])
rotatedPoint = 2×3
-0.0000 0.7071 0
0.5000 -0.5000 0
Tracez les points pivotés.
plot(rotatedPoint(1,1),rotatedPoint(1,2),"bo") plot(rotatedPoint(2,1),rotatedPoint(2,2),"go")

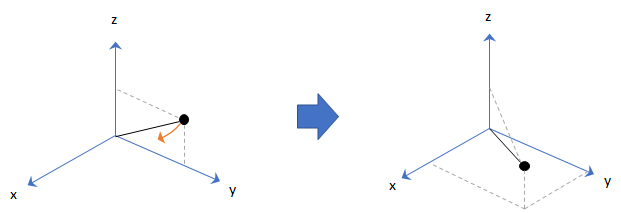
Définissez deux points dans un espace tridimensionnel. Définissez un quaternion pour faire pivoter le point en tournant d'abord autour de l'axe z de 30 degrés, puis autour du nouvel axe y de 45 degrés.
a = [1,0,0]; b = [0,1,0]; quat = quaternion([30,45,0],"eulerd","ZYX","point");
Utilisez rotatepoint pour faire pivoter les deux points à l'aide de l'opérateur de rotation quaternion. Affichez le résultat.
rP = rotatepoint(quat,[a;b])
rP = 2×3
0.6124 0.5000 -0.6124
-0.3536 0.8660 0.3536
Visualisez l'orientation d'origine et l'orientation pivotée des points. Tracez des lignes depuis l'origine jusqu'à chacun des points à des fins de visualisation.
plot3(a(1),a(2),a(3),"bo"); hold on grid on axis([-1 1 -1 1 -1 1]) xlabel("x") ylabel("y") zlabel("z") plot3(b(1),b(2),b(3),"ro") plot3(rP(1,1),rP(1,2),rP(1,3),"bd") plot3(rP(2,1),rP(2,2),rP(2,3),"rd") plot3([0;rP(1,1)],[0;rP(1,2)],[0;rP(1,3)],"k") plot3([0;rP(2,1)],[0;rP(2,2)],[0;rP(2,3)],"k") plot3([0;a(1)],[0;a(2)],[0;a(3)],"k") plot3([0;b(1)],[0;b(2)],[0;b(3)],"k")

Arguments d'entrée
Arguments de sortie
Algorithmes
La rotation du point du quaternion fait tourner un point spécifié dans R3 selon un quaternion spécifié :
où q est le quaternion, * représente la conjugaison, et u est le point à faire pivoter, spécifié comme quaternion.
Pour plus de commodité, la fonction rotatepoint prend un point dans R3 et renvoie un point dans R3. Étant donné un appel de fonction avec un quaternion arbitraire, q = a + bi + cj + dk, et une coordonnée arbitraire, [x,y,z], par exemple,
rereferencedPoint = rotatepoint(q,[x,y,z])
rotatepoint effectue les opérations suivantes :
Convertit le point [x,y,z] en quaternion :
Normalise le quaternion, q:
Applique la rotation :
Convertit la sortie du quaternion, vq, en R3
Capacités étendues
Historique des versions
Introduit dans R2019b