skyplot
Tracer les données d'azimut et d'élévation du satellite
Syntaxe
Description
skyplot( crée un tracé du ciel en utilisant les données d'azimut et d'élévation spécifiées sous forme de matrices en degrés. Les angles d'azimut sont mesurés en degrés, dans le sens des aiguilles d'une montre à partir de la direction nord. Les angles d'élévation sont mesurés à partir de la ligne d'horizon, 90 degrés étant directement vers le haut. Pour plus de détails sur les éléments de la figure du tracé du ciel, voir Principaux éléments du tracé du ciel.azdata,eldata)
skyplot( spécifie les données d'azimut et d'élévation dans une structure avec les champs status)SatelliteAzimuth et SatelliteElevation.
skyplot(___, spécifie les options utilisant un ou plusieurs arguments nom-valeur en plus des arguments d'entrée dans les syntaxes précédentes. Les arguments nom-valeur sont des propriétés de l'objet Name,Value)SkyPlotChart . Pour une liste des propriétés, voir Propriétés SkyPlotChart.
skyplot( crée le tracé du ciel dans la figure, le panneau ou l'onglet spécifié par parent,___)parent.
h = skyplot(___)SkyPlotChart , h. Utilisez h pour modifier les propriétés du graphique après l'avoir créé. Pour une liste des propriétés, voir Propriétés SkyPlotChart.
Exemples
Créez un modèle de capteur GNSS en tant qu'objet système gnssSensor System object™.
gnss = gnssSensor;
Spécifiez la position et la vitesse du capteur. Simulez les lectures du capteur et obtenez l'état des satellites visibles. Stockez les angles d’azimut et d’élévation sous forme de vecteurs.
pos = [0 0 0]; vel = [0 0 0]; [~, ~, status] = gnss(pos, vel); satAz = status.SatelliteAzimuth; satEl = status.SatelliteElevation;
Créez des masques d'élévation locaux aléatoires, avec une élévation maximale de 30 degrés, pour agir en tant qu'environnement local.
rng(8) terrainMaskElevations = 30*rand(1,12); % elevations (degrees) terrainMaskEdges = [0 24 48 100 132 180 204 240 276 288 300 312 360]; % azimuth edges (degrees)
Tracez les positions des satellites avec les masques d'élévation.
skyplot(satAz,satEl,MaskElevation=terrainMaskElevations,MaskAzimuthEdges=terrainMaskEdges);

Animez la trajectoire des positions des satellites au fil du temps à partir d’un capteur GNSS.
Initialisez la figure du tracé du ciel. Spécifiez les informations de pas de temps pertinentes.
skyplotHandle = skyplot(0,0);
numHours = 12; dt = 100; numSeconds = numHours * 60 * 60; numSimSteps = numSeconds/dt;
Créez un modèle de capteur GNSS en tant que gnssSensor System Object™.
gnss = gnssSensor('SampleRate', 1/dt); Parcourez les étapes de temps et procédez comme suit :
Simulez les lectures du capteur. Spécifiez la position zéro et la vitesse du capteur stationnaire.
Stockez les angles d’azimut et d’élévation sous forme de vecteurs.
Définissez directement les propriétés
AzimuthDataetElevationDatadu handleSkyPlotChart.
for i = 1:numSimSteps [~, ~, status] = gnss([0 0 0],[0 0 0]); satAz = status.SatelliteAzimuth; satEl = status.SatelliteElevation; set(skyplotHandle,'AzimuthData',satAz,'ElevationData',satEl); drawnow end

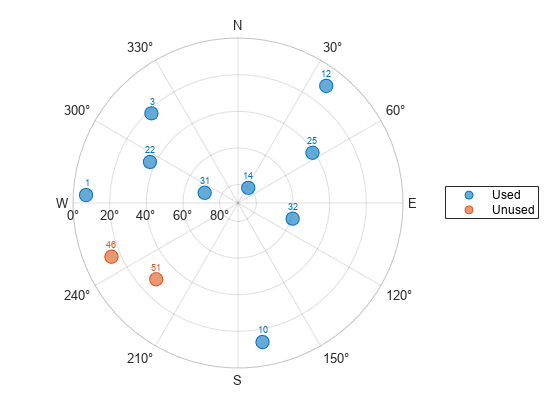
Chargez les données d'azimut et d'élévation à partir d'un fichier journal généré par un capteur satellite GPS Adafruit®. Les données fournies dans cet exemple contiennent l'azimut et l'élévation de chaque satellite ainsi que les codes de bruit pseudo-aléatoire (PRN). Stockez ces valeurs sous forme de vecteurs.
load('gpsHWInfo','hwInfo') satAz = hwInfo.SatelliteAzimuths; satEl = hwInfo.SatelliteElevations; prn = hwInfo.SatellitePRNs;
Séparez les satellites en fonction des codes PRN. Pour corréler chaque position avec un groupe, créez un tableau categorical . Pour cet ensemble de satellites, seuls ceux dont les PRN sont inférieurs à 32 sont utilisés dans la solution de positionnement.
isUnused = (prn > 32); group = categorical(isUnused,[false true],["Used in Positioning Solution" "Unused"]);
Visualisez les satellites et spécifiez les groupes catégoriels dans l'argument nom-valeur GroupData . Spécifiez le PRN comme étiquette pour chaque point. Montrez la légende.
skyplot(satAz,satEl,prn,GroupData=group) legend('Used','Unused')
Spécifiez la position du récepteur, le fichier de navigation RINEX, l’angle du masque, la taille du pas de temps et le nombre d’heures de données à échantillonner à partir du fichier RINEX.
recPos = [42 -71 50]; navfile = "GODS00USA_R_20211750000_01D_GN.rnx"; maskAngle = 25; dt = 60; % seconds numHours = 4;
Lisez le fichier de navigation et obtenez les données GPS de tous les satellites capturés dans le fichier.
data = rinexread(navfile); [~,satIdx] = unique(data.GPS.SatelliteID); navmsg = data.GPS(satIdx,:);
Réglez l'heure de début sur l'heure initiale du message de navigation. Ensuite, créez le vecteur temporel t.
startTime = navmsg.Time(1); secondsPerHour = 3600; timeElapsed = 0:dt:(secondsPerHour*numHours); t = startTime + seconds(timeElapsed);
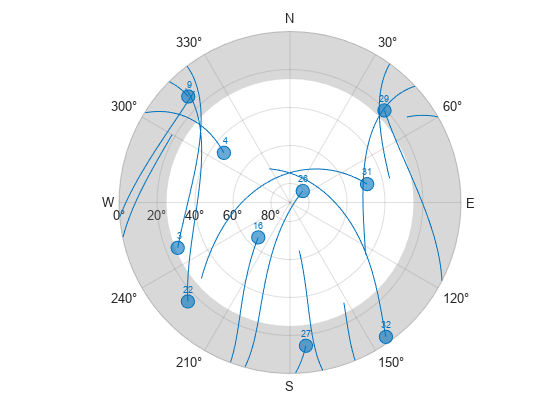
Initialisez les vecteurs pour l'azimut et l'élévation. Ensuite, collectez les données d'azimut et d'élévation aux heures t pour tous les satellites.
numSats = numel(navmsg.SatelliteID); allAz = NaN(numel(t),numSats); allEl = allAz; for idx = 1:numel(t) [satPos,~,satID] = gnssconstellation(t(idx),RINEXData=navmsg); [az,el,vis] = lookangles(recPos,satPos,maskAngle); allAz(idx,:) = az; allEl(idx,:) = el; end
Marquez tous les satellites sous l'horizon avec une élévation inférieure à 0 comme manquants.
allEl(allEl < 0) = missing;
Affichez les trajectoires des satellites sous forme d'animation en créant un skyplot et en mettant à jour les propriétés AzimuthData et ElevationData .
figure sp = skyplot(allAz(1,:),allEl(1,:),satID,MaskElevation=maskAngle); for idx = 1:size(allAz, 1) set(sp,AzimuthData=allAz(1:idx,:),ElevationData=allEl(1:idx,:)); drawnow limitrate end
Arguments d'entrée
Arguments de sortie
En savoir plus

Les principaux éléments de la figure sont :
Axes d'azimut — Spécifiés par l'argument d'entrée
azdata, les positions de l'angle d'azimut sont mesurées dans le sens des aiguilles d'une montre à partir de la direction nord.Axes d'élévation — Spécifiés par l'argument d'entrée
eldata, les positions des angles d'élévation sont mesurées à partir de la ligne d'horizon, 90 degrés étant directement vers le haut.Étiquettes — Spécifié par l'argument d'entrée
labeldatasous la forme d'un tableau de chaînes de caractères avec un élément pour chaque point des vecteursazdataeteldata.Groupes — Spécifié par la propriété
GroupData, un tableaucategoricaldéfinit le groupe pour chaque position satellite.