stateSamplerGaussian
Échantillonneur d'état gaussien pour la planification de mouvements basée sur l'échantillonnage
Depuis R2023b
Description
L'objet stateSamplerGaussian crée un échantillonneur d'état pour la planification de mouvement en utilisant la distribution gaussienne. Utilisez cet échantillonneur pour planifier des mouvements dans des passages étroits. Pour plus d'informations sur la façon dont l'échantillonneur d'état gaussien sélectionne les échantillons d'état valides, voir Rechercher des exemples d'états à l'aide de l'échantillonneur d'état gaussien.
Création
Syntaxe
Description
sampler = stateSamplerGaussianstateSpaceSE2 avec les paramètres par défaut.
sampler = stateSamplerGaussian(stateValidator)validatorOccupancyMap pour créer un validateur d'état et utilisez le validateur d'état comme entrée de l'échantillonneur d'état gaussien.
sampler = stateSamplerGaussian(___,Name=Value)StandardDeviation et MaxAttempts comme arguments nom-valeur.
Propriétés
Fonctions d'objet
Exemples
Échantillonnez un espace d'état SE(2) à l'aide d'un échantillonneur d'état gaussien et observez l'impact des valeurs des paramètres de l'échantillonneur sur les résultats d'échantillonnage.
Définissez la valeur de départ pour vous assurer de générer les mêmes résultats.
rng(50,"twister");Créez une carte d'occupation simple avec un passage étroit.
map = binaryOccupancyMap; occupied = [5*ones(9,1),[1; 2; 3; 4; 5; 7; 8; 9; 10]]; setOccupancy(map,occupied,1); figure(Position=[0, 0, 200, 200]) show(map)
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](samplese2statespaceusinggaussianstatesamplerexample_01_fr.png)
Définissez les limites inférieure et supérieure des variables de l'espace d'état x, y et theta à partir de la carte d'occupation.
x = map.XWorldLimits; y = map.YWorldLimits; theta = [-pi pi];
Créez un objet SE(2) d'espace d'état à l'aide des variables d'espace d'état spécifiées. Vérifiez la validité des états dans l'espace d'état d'entrée à l'aide d'un validateur d'état. Définissez la distance de validation sur 0,01.
ss = stateSpaceSE2([x; y; theta]); sv = validatorOccupancyMap(ss,Map=map); sv.ValidationDistance = 0.01;
Exemple d'espace d'état à l'aide d'un échantillonneur d'état gaussien
Créez un échantillonneur d'état gaussien avec les valeurs de paramètres par défaut. Par défaut:
Le nombre maximum de tentatives que l'échantillonneur doit effectuer pour trouver les échantillons d'état est fixé à 10.
Les valeurs d'écart type le long de laetles directions sont définies respectivement sur 0,1, 0,1 et 0,0628.
sampler_orig = stateSamplerGaussian(sv)
sampler_orig =
stateSamplerGaussian with properties:
StateSpace: [1x1 stateSpaceSE2]
StateValidator: [1x1 validatorOccupancyMap]
StandardDeviation: [0.1000 0.1000 0.0628]
MaxAttempts: 10
Générez 40 échantillons pour la planification de mouvement à partir de l'espace d'état d'entrée.
states_orig = sample(sampler_orig,40);
Vous pouvez générer des échantillons optimaux en modifiant le nombre maximum de tentatives et les valeurs d'écart type. Si les échantillons sont dispersés dans tout l'espace d'entrée, augmentez le nombre maximum de tentatives et les valeurs d'écart type pour concentrer les échantillons d'état autour de la limite de l'obstacle.
Varier le nombre maximum de tentatives
Créez des copies de l'objet échantillonneur d'état d'origine et modifiez le nombre maximum de tentatives, propriété de l'échantillonneur, MaxAttempts, pour étudier son impact sur les résultats d'échantillonnage. Définissez les valeurs d’écart type sur les valeurs par défaut.
Définissez le nombre maximum de tentatives pour trouver des échantillons valides sur 100 et générez 40 nouveaux échantillons à partir de l'espace d'état d'entrée.
sampler_2 = copy(sampler_orig); sampler_2.MaxAttempts = 100; states_2 = sample(sampler_2,40);
Définissez le nombre maximum de tentatives pour trouver des échantillons valides sur 200 et générez 40 nouveaux échantillons à partir de l'espace d'état d'entrée.
sampler_3 = copy(sampler_orig); sampler_3.MaxAttempts = 200; states_3 = sample(sampler_3,40);
Affichez les résultats à l'aide de la fonction d'assistance helperDisplayStates . Notez que, à mesure que le nombre de tentatives augmente, les échantillons se concentrent davantage autour de la limite de l’obstacle.
helperDisplayStates(map,states_orig,sampler_2,states_2,sampler_3,states_3,"MaxAttempts");![Figure contains 3 axes objects and other objects of type uipanel. Axes object 1 with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 2 objects of type image, line. One or more of the lines displays its values using only markers This object represents State. Axes object 2 with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 2 objects of type image, line. One or more of the lines displays its values using only markers This object represents State. Axes object 3 with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 2 objects of type image, line. One or more of the lines displays its values using only markers This object represents State.](samplese2statespaceusinggaussianstatesamplerexample_02_fr.png)
Varier l'écart type
Créez des copies de l'objet échantillonneur d'état d'origine et modifiez l'écart type, propriété de l'échantillonneur, StandardDeviation, pour étudier son impact sur les résultats d'échantillonnage. Définissez le nombre maximum de tentatives sur 200.
Générez 40 échantillons avec les valeurs d’écart type par défaut.
sampler_orig.MaxAttempts = 200; states_orig = sample(sampler_orig,40);
Définissez les valeurs d’écart type sur [0,01 0,01 0,06]. Générez 40 nouveaux échantillons à partir de l’espace d’état d’entrée.
sampler_4 = copy(sampler_orig); sampler_4.StandardDeviation = [0.01 0.01 0.06]; states_4 = sample(sampler_4,40);
Définissez les valeurs d’écart type sur [0,5 0,5 0,06]. Générez 40 nouveaux échantillons à partir de l’espace d’état d’entrée.
sampler_5 = copy(sampler_orig); sampler_5.StandardDeviation = [0.5 0.5 0.06]; states_5 = sample(sampler_5,40);
Affichez les résultats à l'aide de la fonction d'assistance helperDisplayStates . Notez que, à mesure que vous augmentez les valeurs d’écart type, les échantillons se concentrent davantage autour de la limite de l’obstacle. Cependant, si les valeurs d'écart type sont supérieures à la largeur des passages étroits dans l'espace d'entrée, l'échantillonneur génère des résultats incorrects.
helperDisplayStates(map,states_orig,sampler_4,states_4,sampler_5,states_5,"Std.Deviation");![Figure contains 3 axes objects and other objects of type uipanel. Axes object 1 with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 2 objects of type image, line. One or more of the lines displays its values using only markers This object represents State. Axes object 2 with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 2 objects of type image, line. One or more of the lines displays its values using only markers This object represents State. Axes object 3 with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 2 objects of type image, line. One or more of the lines displays its values using only markers This object represents State.](samplese2statespaceusinggaussianstatesamplerexample_03_fr.png)
Fonction d'assistance
helperDisplayStates affiche les résultats à l’aide d’une fenêtre de figure personnalisée.
function helperDisplayStates(map,states_orig,sampler_2,states_2,sampler_3,states_3,select) if select == "MaxAttempts" title_1 = "MaxAttempts = 10 (Default value)"; title_2 = strcat("MaxAttempts = ",num2str(sampler_2.MaxAttempts)); title_3 = strcat("MaxAttempts = ",num2str(sampler_3.MaxAttempts)); elseif select == "Std.Deviation" title_1 = "StandardDeviation = [0.1 0.1 0.06] (Default value)"; title_2 = strcat("StandardDeviation = [0.01 0.01 0.06]"); title_3 = strcat("StandardDeviation = [0.5 0.5 0.06]"); end fig_1 = figure(Position=[0 0 700 300]); movegui("center") panel_1 = uipanel(fig_1, ... Position=[0 0 0.33 1], ... Title=title_1); hPlot1 = axes(panel_1); show(map,Parent=hPlot1); hold on; plot(states_orig(:,1),states_orig(:,2),plannerLineSpec.state{:}) hold off panel_2 = uipanel(fig_1, ... Position=[0.33 0 0.33 1], ... Title=title_2); hPlot2 = axes(panel_2); show(map,Parent=hPlot2); hold on; plot(states_2(:,1),states_2(:,2),plannerLineSpec.state{:}) hold off panel_3 = uipanel(fig_1, ... Position=[0.66 0 0.33 1], ... Title=title_3); hPlot3 = axes(panel_3); show(map,Parent=hPlot3); hold on; plot(states_3(:,1),states_3(:,2),plannerLineSpec.state{:}) hold off end
Échantillonnez un espace d'états pour la planification de mouvements à l'aide de la distribution gaussienne, puis utilisez les états échantillonnés pour trouver un chemin optimal entre deux points dans l'espace d'états d'entrée. Utilisez un planificateur de chemin PRM pour calculer un chemin optimal entre deux points.
Définissez la valeur de départ du nombre aléatoire pour garantir la répétabilité.
rng(100,"twister");Créer une carte d'occupation et rechercher des variables d'état
Chargez une carte binaire représentant l'environnement de l'espace d'état d'entrée dans l'espace de travail MATLAB®.
load("mapData.mat")Créez une carte d'occupation à partir de l'entrée.
map = occupancyMap(narrowPassageMap);
Trouvez les limites inférieure et supérieure des variables de l'espace d'état x, y et theta à partir de la carte d'occupation.
x = map.XWorldLimits; y = map.YWorldLimits; theta = [-pi pi];
Créer un échantillonneur d'état gaussien
Créez un objet SE(2) d'espace d'état à l'aide des variables d'espace d'état spécifiées.
stateSpace = stateSpaceSE2([x; y; theta]);
Vérifiez la validité des états dans l'espace d'état d'entrée à l'aide d'un validateur d'état.
stateValidator = validatorOccupancyMap(stateSpace,Map=map);
Créez un échantillonneur d'état gaussien pour échantillonner l'espace d'état spécifié. Définissez les valeurs d’écart type.
sampler = stateSamplerGaussian(stateValidator,StandardDeviation=[25 5 0.05]);
Configurer le planificateur de chemin PRM
Configurez le planificateur de chemin PRM. Utilisez l'échantillonneur d'état gaussien pour échantillonner l'espace d'état d'entrée.
planner = plannerPRM(stateSpace,stateValidator,StateSampler=sampler);
Trouver le chemin optimal entre deux états
Spécifiez le point de départ et le point d'objectif dans l'espace d'état d'entrée.
start = [55 50 0]; goal = [210 190 0];
Calculez le chemin optimal entre le point de départ et le point d'arrivée à l'aide du planificateur de chemin PRM.
[path,info] = plan(planner,start,goal);
Visualisez les résultats
Afficher la carte d'occupation.
figure
show(map)
hold onTracez le point de départ et le point d'arrivée. Spécifiez les propriétés de couleur et de ligne par défaut pour tracer les points de départ et d'arrivée à l'aide des fonctions plannerLineSpec.start t et plannerLineSpec.goal , respectivement.
plot(start(1),start(2),plannerLineSpec.start{:});
plot(goal(1),goal(2),plannerLineSpec.goal{:}); Si le planificateur a trouvé un chemin optimal entre les états de départ et d'objectif, tracez les résultats. Utilisez la fonction plannerLineSpec.path pour spécifier la couleur et les propriétés de ligne par défaut pour tracer le chemin.
if info.IsPathFound plot(path.States(:,1),path.States(:,2),plannerLineSpec.path{:}) legend else disp("Path not found. Try modifying the planner parameters."); end
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers These objects represent Start, Goal, Path.](performmotionplanningusinggaussianstatesamplingexample_01_fr.png)
En savoir plus
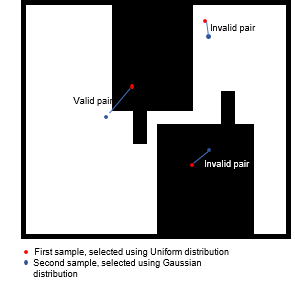
L'échantillonneur génère à plusieurs reprises des paires d'états. L'échantillonneur sélectionne le premier échantillon d'état dans chaque paire en utilisant une distribution uniforme, et le deuxième échantillon d'état en utilisant une distribution gaussienne centrée autour du premier échantillon.
L'échantillonneur détermine la distance entre le premier échantillon et le deuxième échantillon de chaque paire en utilisant les paramètres gaussiens σx, σy et σθ.
σx spécifie la propagation le long de la direction x
σy spécifie la propagation le long de la direction y.
σθ spécifie la propagation le long de la direction angulaire.
Le validateur d'état considère qu'une paire d'états générée est valide si un échantillon d'état de la paire se trouve sur l'obstacle et l'autre se trouve dans l'espace libre. L'échantillon de la paire valide qui se trouve dans l'espace libre est renvoyé comme échantillon d'état pour la planification du mouvement.
Pour obtenir les échantillons optimaux pour la planification de mouvements, vous pouvez diminuer ou augmenter les valeurs d'écart type.
Lorsque vous diminuez la valeur de l'écart type le long d'une direction particulière, la distance entre deux échantillons de chaque paire valide diminue le long de la direction spécifiée. Diminuez les valeurs d’écart type si l’espace d’entrée pour la planification du mouvement comporte des passages trop étroits. Vous devez également augmenter le nombre maximum de tentatives de l'échantillonneur pour trouver les échantillons optimaux.
Lorsque vous augmentez la valeur de l'écart type le long d'une direction particulière, la distance entre deux échantillons de chaque paire valide augmente le long de la direction spécifiée. Augmentez les valeurs d'écart type si l'espace d'entrée pour la planification du mouvement ne comporte pas de passages trop étroits.
Historique des versions
Introduit dans R2023b