tunerPlotPose
Tracer les estimations de pose du filtre pendant le réglage
Description
stopTuning = tunerPlotPose(params,tunerValues)params contient les meilleures estimations des paramètres de filtre au cours de l'itération de réglage en cours. tunerValues contient des informations sur la configuration du tuner, les données du capteur et les données de vérité sur le terrain. Utilisez cette fonction comme valeur pour la propriété OutputFcn de l'objet tunerconfig pour tracer les résultats du réglage pendant les itérations.
Exemples
Créez un objet tunerconfiguration . Définissez la fonction tunerPlotPose comme fonction de sortie de l'objet.
tc = tunerconfig('imufilter','OutputFcn',@tunerPlotPose)
tc =
tunerconfig with properties:
Filter: "imufilter"
TunableParameters: ["AccelerometerNoise" "GyroscopeNoise" "GyroscopeDriftNoise" "LinearAccelerationNoise" "LinearAccelerationDecayFactor"]
StepForward: 1.1000
StepBackward: 0.5000
MaxIterations: 20
ObjectiveLimit: 0.1000
FunctionTolerance: 0
Display: iter
Cost: RMS
OutputFcn: @tunerPlotPose
Chargez les données du capteur préenregistrées.
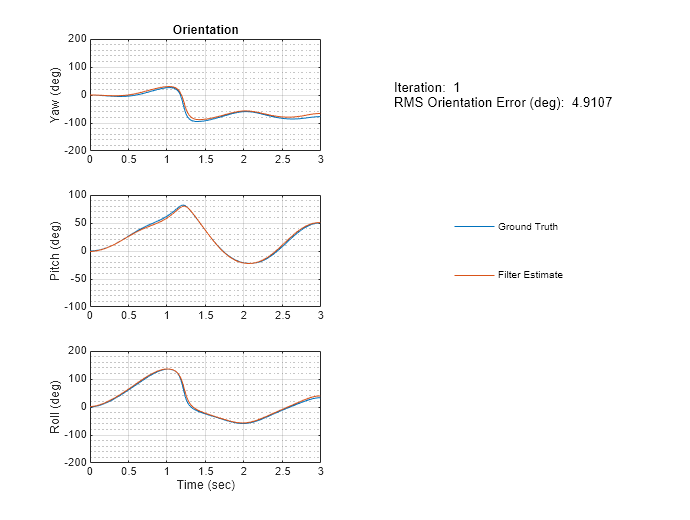
ld = load('imufilterTuneData.mat');Ajustez un objet imufilter à l'aide des données du capteur. Les données de vérité et les estimations sont présentées dans une figure.
tune(imufilter,ld.sensorData,ld.groundTruth,tc)
Iteration Parameter Metric
_________ _________ ______
1 AccelerometerNoise 0.0857
Arguments d'entrée
Arguments de sortie
Historique des versions
Introduit dans R2021a
Voir aussi
tunerconfig | tunernoise | imufilter | ahrsfilter | ahrs10filter | insfilterMARG | insfilterAsync | insfilterErrorState | insfilterNonholonomic