ahrs10filter
Hauteur et orientation à partir des lectures MARG et altimétriques
Description
L'objet ahrs10filter fusionne les données du capteur MARG et de l'altimètre pour estimer la hauteur et l'orientation de l'appareil. Les données MARG (magnétique, vitesse angulaire, gravité) sont généralement dérivées de capteurs magnétomètres, gyroscopes et accéléromètres. Le filtre utilise un vecteur d'état à 18 éléments pour suivre le quaternion d'orientation, la vitesse verticale, la position verticale, les biais du capteur MARG et le vecteur géomagnétique. L'objet ahrs10filter utilise un filtre de Kalman étendu pour estimer ces quantités.
Création
Syntaxe
Description
FUSE = ahrs10filterFUSE, pour la fusion des capteurs de MARG et des lectures d'altimètre afin d'estimer la hauteur et l'orientation de l'appareil.
FUSE = ahrs10filter('ReferenceFrame',RF)RF. Spécifiez RF comme 'NED' (Nord-Est-Bas) ou 'ENU' (Est-Nord-Up). La valeur par défaut est 'NED'.
FUSE = ahrs10filter(___,Name,Value)Name au Value spécifié. Les propriétés non spécifiées ont des valeurs par défaut.
Propriétés
Fonctions d'objet
predict | Mettre à jour les états à l'aide des données de l'accéléromètre et du gyroscope pour ahrs10filter |
fusemag | Corriger les états à l'aide des données du magnétomètre pour ahrs10filter |
fusealtimeter | Corriger les états à l'aide des données altimétriques pour ahrs10filter |
correct | Corriger les états à l'aide de mesures d'état directes pour ahrs10filter |
residual | Residuals and residual covariances from direct state measurements for
ahrs10filter |
residualmag | Résidus et covariance résiduelle des mesures du magnétomètre pour ahrs10filter |
residualaltimeter | Résidus et covariance résiduelle des mesures altimétriques pour ahrs10filter |
pose | Orientation actuelle et estimation de position pour ahrs10filter |
reset | Reset internal states for ahrs10filter |
stateinfo | Afficher les informations vectorielles d'état pour ahrs10filter |
tune | Ajustez les paramètres ahrs10filter pour réduire l'erreur d'estimation |
copy | Créer une copie de ahrs10filter |
Exemples
Chargez les données de capteur enregistrées, la pose de vérité terrain et l'état initial et la covariance de l'état initial. Calculez le nombre d’échantillons IMU par échantillon d’altimètre et le nombre d’échantillons IMU par échantillon de magnétomètre.
load('fuse10exampledata.mat', ... 'imuFs','accelData','gyroData', ... 'magnetometerFs','magData', ... 'altimeterFs','altData', ... 'expectedHeight','expectedOrient', ... 'initstate','initcov'); imuSamplesPerAlt = fix(imuFs/altimeterFs); imuSamplesPerMag = fix(imuFs/magnetometerFs);
Créez un filtre AHRS qui fusionne les lectures MARG et altimétriques pour estimer la hauteur et l'orientation. Définissez le taux d'échantillonnage et les bruits de mesure des capteurs. Les valeurs ont été déterminées à partir de fiches techniques et d’expérimentations.
filt = ahrs10filter('IMUSampleRate',imuFs, ... 'AccelerometerNoise',0.1, ... 'State',initstate, ... 'StateCovariance',initcov); Ralt = 0.24; Rmag = 0.9;
Pré-attribuez des variables à la hauteur et à l'orientation du journal.
numIMUSamples = size(accelData,1);
estHeight = zeros(numIMUSamples,1);
estOrient = zeros(numIMUSamples,1,'quaternion');Fusionner les données de l'accéléromètre, du gyroscope, du magnétomètre et de l'altimètre. La boucle externe prédit le filtre en avant à la fréquence d'échantillonnage la plus rapide (la fréquence d'échantillonnage IMU).
for ii = 1:numIMUSamples % Use predict to estimate the filter state based on the accelometer and % gyroscope data. predict(filt,accelData(ii,:),gyroData(ii,:)); % Magnetometer data is collected at a lower rate than IMU data. Fuse % magnetometer data at the lower rate. if ~mod(ii,imuSamplesPerMag) fusemag(filt,magData(ii,:),Rmag); end % Altimeter data is collected at a lower rate than IMU data. Fuse % altimeter data at the lower rate. if ~mod(ii, imuSamplesPerAlt) fusealtimeter(filt,altData(ii),Ralt); end % Log the current height and orientation estimate. [estHeight(ii),estOrient(ii)] = pose(filt); end
Calculez les erreurs RMS entre la hauteur et l’orientation réelles connues et la sortie du filtre AHRS.
pErr = expectedHeight - estHeight;
qErr = rad2deg(dist(expectedOrient,estOrient));
pRMS = sqrt(mean(pErr.^2));
qRMS = sqrt(mean(qErr.^2));
fprintf('Altitude RMS Error\n');Altitude RMS Error
fprintf('\t%.2f (meters)\n\n',pRMS);0.38 (meters)
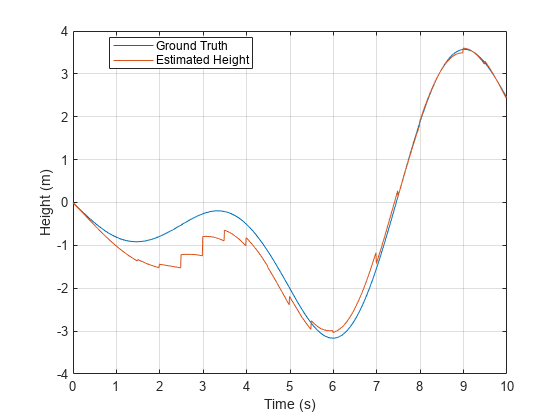
Visualisez la hauteur réelle et estimée au fil du temps.
t = (0:(numIMUSamples-1))/imuFs; plot(t,expectedHeight);hold on plot(t,estHeight);hold off legend('Ground Truth','Estimated Height','location','best') ylabel('Height (m)') xlabel('Time (s)') grid on
fprintf('Quaternion Distance RMS Error\n');Quaternion Distance RMS Error
fprintf('\t%.2f (degrees)\n\n',qRMS);2.93 (degrees)
Capacités étendues
Historique des versions
Introduit dans R2019a