structuralBC
(To be removed) Specify boundary conditions for structural model
structuralBC will be removed. Use
edgeBC and
faceBC
instead. (since R2023a) For more information on updating your code, see Version History.
Syntax
Description
Standard Boundary Constraints and Displacements
structuralBC(
specifies one of the standard structural boundary constraints. Here,
structuralmodel,RegionType,RegionID,"Constraint",Cval)Cval can be "fixed",
"free", "roller", or
"symmetric". The default value is
"free".
Avoid using "symmetric" for transient and modal analysis,
since the symmetric constraint can prevent the participation of some structural
modes.
structuralBC(
enforces displacement on the boundary of type structuralmodel,RegionType,RegionID,"Displacement",Dval)RegionType
with RegionID ID numbers.
structuralBC(
specifies the x-, y-, and z-components of the enforced displacement.structuralmodel,RegionType,RegionID,"XDisplacement",XDval,"YDisplacement",YDval,"ZDisplacement",ZDval)
structuralBC does not require you to specify all three
components. Depending on your structural analysis problem, you can specify one
or more components by picking the corresponding arguments and omitting
others.
structuralBC(
specifies the r- and z-components of the enforced displacement for an
axisymmetric model. The radial component (r-component) must be zero on the axis
of rotation.structuralmodel,RegionType,RegionID,"RDisplacement",RDval,"ZDisplacement",ZDval)
structuralBC does not require you to specify both
components.
Harmonic, Rectangular, Triangular, and Trapezoidal Displacement Pulses
structuralBC(specifies
the form and duration of the time-varying value of the x-component of the
enforced displacement. You can also specify the form and duration of the other
components of the displacement as follows:structuralmodel,RegionType,RegionID,"XDisplacement",XDval,Name,Value)
structuralBC(...,"YDisplacement",for the y-component.YDval,Name,Value)structuralBC(...,"ZDisplacement",for the z-component. Use this syntax for a 3-D or axisymmetric model.ZDval,Name,Value)structuralBC(...,"RDisplacement",for the radial component in an axisymmetric model.RDval,Name,Value)
Multipoint Constraint
structuralBC(
sets the multipoint constraint using all degrees of freedom on the combination
of geometric regions specified by structuralmodel,RegionType,RegionID,"Constraint","multipoint")RegionType and
RegionID. The reference location for the constraint is
the geometric center of all nodes on the combination of all specified geometric
regions.
This syntax is required if you intend to use results obtained with the model
order reduction technique in the Simscape™
Multibody™
Reduced Order Flexible Solid block. Simscape models expect the connections at all joints to have six degrees of
freedom, while Partial Differential Equation Toolbox™ uses two or three degrees of freedom at each node. Setting a
multipoint constraint ensures that all nodes and all degrees of freedom for the
specified geometric regions have a rigid constraint with the geometric center of
all specified geometric regions altogether as the reference point. The reference
location has six degrees of freedom.
For better performance, specify geometric regions with a minimal number of nodes. For example, use a set of edges instead of using a face, and a set of vertices instead of using an edge.
structuralBC(___,"Reference",
specifies the reference point for the multipoint constraint instead of using the
geometric center of all specified regions as a reference point. Coords)
Use this syntax with the input arguments from the previous syntax.
Sparse Linear Models for Use with Control System Toolbox
structuralBC(___,"Label",
adds a label for the structural boundary condition to be used by the labeltext)linearizeInput function. This function lets you pass boundary
conditions to the linearize function that extracts sparse linear models for use
with Control System Toolbox™.
Vectorized Evaluation for Function Handles
structuralBC(___,"Vectorized","on") uses
vectorized function evaluation when you pass a function handle as an argument.
If your function handle computes in a vectorized fashion, then using this
argument saves time. See Vectorization. For details on this
evaluation, see Nonconstant Boundary Conditions.
Use this syntax with any of the input arguments from previous syntaxes.
Structural Boundary Condition Object
bc = structuralBC(___)
Examples
Apply fixed boundaries and traction on two ends of a bimetallic cable.
Create a structural model.
structuralModel = createpde("structural","static-solid");
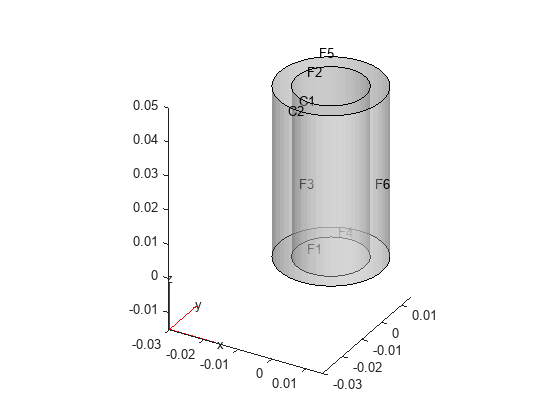
Create nested cylinders to model a bimetallic cable.
gm = multicylinder([0.01,0.015],0.05);
Assign the geometry to the structural model and plot the geometry.
structuralModel.Geometry = gm; pdegplot(structuralModel,"CellLabels","on", ... "FaceLabels","on", ... "FaceAlpha",0.4)
For each metal, specify Young's modulus and Poisson's ratio.
structuralProperties(structuralModel,"Cell",1,"YoungsModulus",110E9, ... "PoissonsRatio",0.28); structuralProperties(structuralModel,"Cell",2,"YoungsModulus",210E9, ... "PoissonsRatio",0.3);
Specify that faces 1 and 4 are fixed boundaries.
structuralBC(structuralModel,"Face",[1,4],"Constraint","fixed")
ans =
StructuralBC with properties:
RegionType: 'Face'
RegionID: [1 4]
Vectorized: 'off'
Boundary Constraints and Enforced Displacements
Displacement: []
XDisplacement: []
YDisplacement: []
ZDisplacement: []
Constraint: "fixed"
Radius: []
Reference: []
Label: []
Boundary Loads
Force: []
SurfaceTraction: []
Pressure: []
TranslationalStiffness: []
Label: []
Specify the surface traction for faces 2 and 5.
structuralBoundaryLoad(structuralModel, ... "Face",[2,5], ... "SurfaceTraction",[0;0;100])
ans =
StructuralBC with properties:
RegionType: 'Face'
RegionID: [2 5]
Vectorized: 'off'
Boundary Constraints and Enforced Displacements
Displacement: []
XDisplacement: []
YDisplacement: []
ZDisplacement: []
Constraint: []
Radius: []
Reference: []
Label: []
Boundary Loads
Force: []
SurfaceTraction: [3×1 double]
Pressure: []
TranslationalStiffness: []
Label: []
Input Arguments
Name-Value Arguments
Example: structuralBC(structuralmodel,"Face",[2,5],"XDisplacement",0.01,"RiseTime",0.5,"FallTime",0.5,"EndTime",3)
Use one or more name-value pair arguments to specify the form and duration of the
time-varying value of a component of displacement. Specify the displacement value
using one of the following arguments: XDval,
YDval, ZDval, or
RDval. You cannot use these name-value pair arguments to
specify more than one time-varying component or to specify the
Dval value.
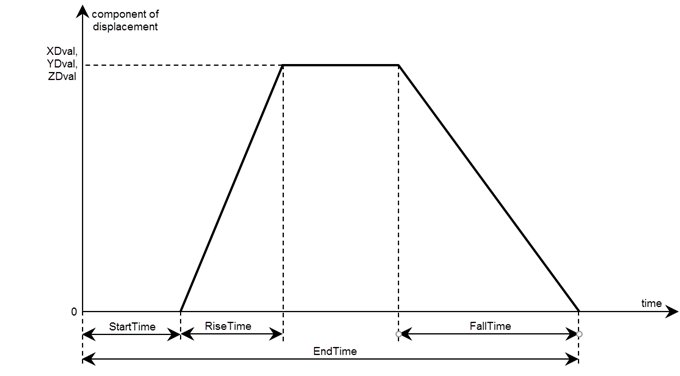
You can model rectangular, triangular, and trapezoidal displacement pulses. If the start time is 0, you do not need to specify it.
For a rectangular pulse, specify the start and end times.
For a triangular pulse, specify the start time and any two of the following times: rise time, fall time, and end time. You also can specify all three times, but they must be consistent.
For a trapezoidal pulse, specify all four times.
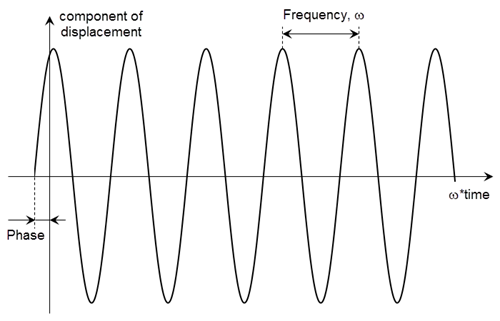
You can model a harmonic displacement by specifying its frequency and initial phase. If the initial phase is 0, you do not need to specify it.
Rectangular, Triangular, or Trapezoidal Pulse
Harmonic Displacement
Output Arguments
More About
Tips
Restrain all rigid body motions by specifying as many boundary conditions as needed. If you do not restrain all rigid body motions, the entire geometry can freely rotate or move. The resulting linear system of equations is singular. The system can take a long time to converge, or it might not converge at all. If the system converges, the solution includes a large rigid body motion in addition to deformation.