structuralIC
(To be removed) Set initial conditions for a transient structural model
structuralIC will be removed. Use
cellIC,
faceIC,
edgeIC, and
vertexIC
instead. (since R2023a) For more information on updating your code, see Version History.
Syntax
Description
structuralIC(
sets initial displacement and velocity for the entire geometry.structuralmodel,"Displacement",u0,"Velocity",v0)
structuralIC(___
sets initial displacement and velocity for a particular geometry region using the
arguments from the previous syntax.RegionType,RegionID)
structuralIC(
sets initial displacement and velocity using the solution
structuralmodel,Sresults)Sresults from a previous structural analysis on the same
geometry. If Sresults is obtained by solving a transient
structural problem, then structuralIC uses the solution
Sresults for the last time-step.
structuralIC(
uses the solution structuralmodel,Sresults,iT)Sresults for the time-step
iT from a previous structural analysis on the same
geometry.
struct_ic = structuralIC(___)
Examples
Specify initial velocity values for the entire geometry and for a particular face.
Create a transient dynamic model for a 3-D problem.
structuralmodel = createpde("structural","transient-solid");
Create a geometry and include it into the model. Plot the geometry.
gm = multicuboid(0.06,0.005,0.01); structuralmodel.Geometry = gm; pdegplot(structuralmodel,"FaceLabels","on","FaceAlpha",0.5) view(50,20)
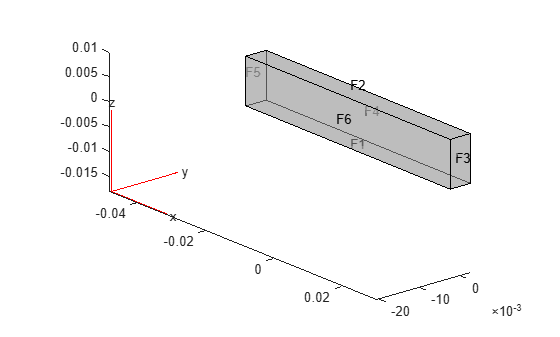
Specify the zero initial velocity on the entire geometry. When you specify only the initial velocity or initial displacement, structuralIC assumes that the omitted parameter is zero. For example, here the initial displacement is also zero.
structuralIC(structuralmodel,"Velocity",[0;0;0])ans =
GeometricStructuralICs with properties:
RegionType: 'Cell'
RegionID: 1
InitialDisplacement: []
InitialVelocity: [3×1 double]
Update the initial velocity on face 2 to model impulsive excitation.
structuralIC(structuralmodel,"Face",2,"Velocity",[0;60;0])
ans =
GeometricStructuralICs with properties:
RegionType: 'Face'
RegionID: 2
InitialDisplacement: []
InitialVelocity: [3×1 double]