Mu Synthesis
The technique of μ synthesis
extends the methods of H∞
synthesis to design a robust controller for a SISO or MIMO uncertain
plant. You can perform μ synthesis on plants with
parameter uncertainty, dynamic uncertainty, or both using the musyn command.
musyn uses an iterative process called
D-K iteration to optimize the robust
H∞ performance of the
system. To get started with μ synthesis, see Robust Controller Design Using Mu Synthesis.
Functions
musyn | Robust controller design using mu synthesis |
musynOptions | Options for musyn |
musynperf | Robust H∞ performance optimized
by musyn |
cmsclsyn | Approximately solve constant-matrix, upper bound µ-synthesis problem |
Topics
- Robust Controller Design Using Mu Synthesis
Use μ synthesis to design an unstructured robust controller or a fixed-structure robust controller for an uncertain plant.
- Improve Results of Mu Synthesis
You can sometimes improve the results of controller synthesis with
musynby changing certain computation options. - Robust Performance Measure for Mu Synthesis
The measure of robust performance calculated by
musynperfand optimized bymusynis the μ upper bound. - D-K Iteration Process
The
musyncommand synthesizes robust controllers using an algorithm that includes iterating between optimizing robust performance (the D step) and computing an H∞ controller (the K step).
Related Information
Featured Examples
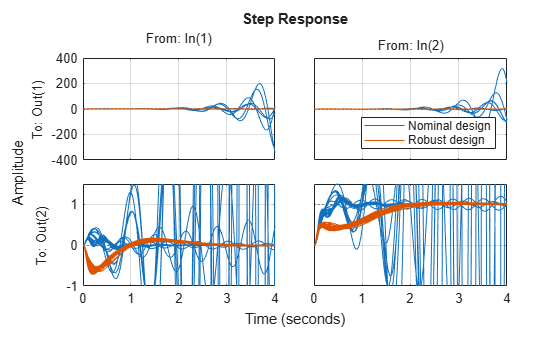
First-Cut Robust Design
Use the Robust Control Toolbox™ commands usample, ucover and musyn to design a robust controller with standard performance objectives. It can serve as a template for more complex robust control design tasks.
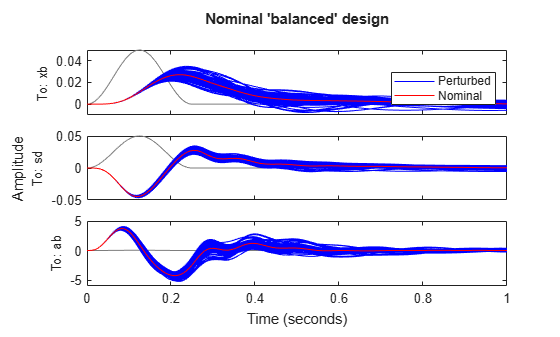
Robust Control of Active Suspension
In this example, use H∞ synthesis to design a controller for a nominal plant model. Then, use μ synthesis to design a robust controller that accounts for uncertainty in the model.

Control of a Two-Tank System
Use Robust Control Toolbox™ to design a robust controller (using D-K iteration) and to do robustness analysis on a process control problem. In our example, the plant is a simple two-tank system.
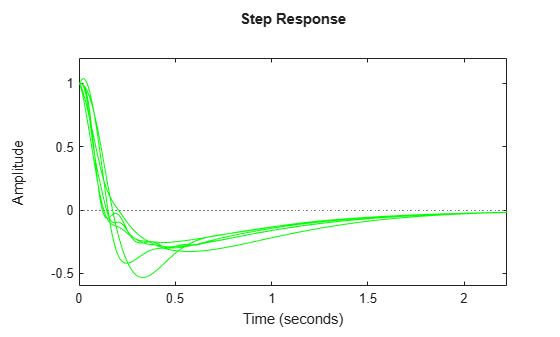
Simultaneous Stabilization Using Robust Control
Uses the Robust Control Toolbox™ commands ucover and musyn to design a high-performance controller for a family of unstable plants.
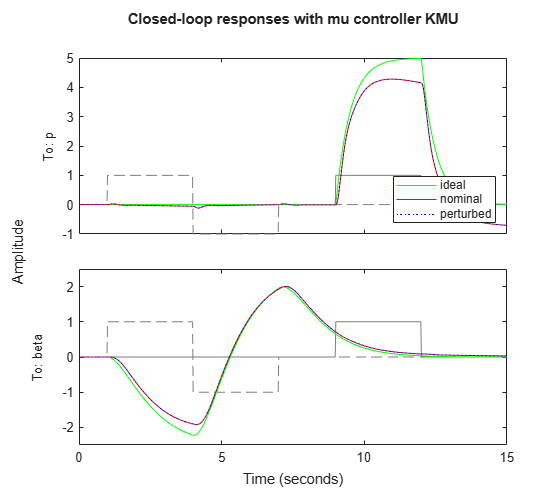
Control of Aircraft Lateral Axis Using Mu Synthesis
Use mu-analysis and synthesis tools in the Robust Control Toolbox™. It describes the design of a robust controller for the lateral-directional axis of an aircraft during powered approach to landing. The linearized model of the aircraft is obtained for an angle-of-attack of 10.5 degrees and airspeed of 140 knots.
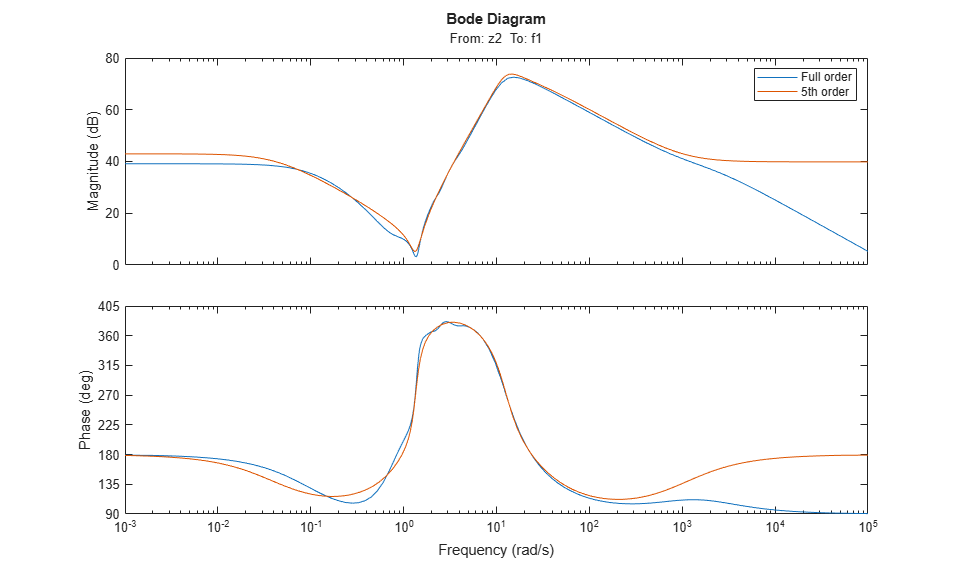
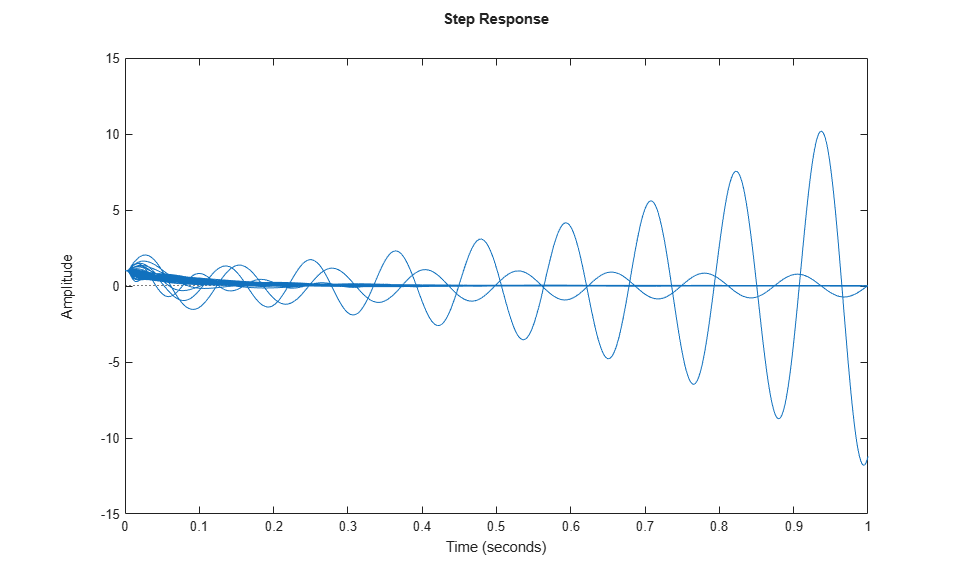
Control of a Spring-Mass-Damper System Using Mixed-Mu Synthesis
Perform mixed-mu synthesis with the musyn command in the Robust Control Toolbox™. Here musyn is used to design a robust controller for a two mass-spring-damper system with uncertainty in the spring stiffness connecting the two masses. This example is taken from the paper "Robust mixed-mu synthesis performance for mass-spring system with stiffness uncertainty," D. Barros, S. Fekri and M. Athans, 2005 Mediterranean Control Conference.
Robust Controller for Spinning Satellite
Design a robust controller using an uncertain plant model that accounts for gain and phase variations. This example expands on the example MIMO Stability Margins for Spinning Satellite.

Robust MIMO Controller for Two-Loop Autopilot
Design a controller for a two-loop autopilot that is robust against gain and phase variations in the multichannel feedback loop.