Uncertain Models
Uncertain state-space (uss) models are linear
systems with uncertain state-space matrices, uncertain linear dynamics,
or both. Most functions that work on numeric LTI models also work on
uss models. These include model interconnection
functions such as connect and
feedback, and linear analysis functions such as
bode and stepinfo. Some
functions that generate plots, such as bode and
step, plot random samples of the uncertain
model to give you a sense of the distribution of uncertain
dynamics.
In addition, you can use functions such as
robstab and wcgain to
perform robustness and worst-case analysis of uncertain systems
represented by uss models. You can also use tuning
functions such as systune for robust controller
tuning.
Functions
Topics
Uncertain Models
- Introduction to Uncertain Elements
Uncertain elements are the building blocks for representing systems with uncertainty.
- Create Models of Uncertain Systems
Represent uncertain parameters and unmodeled dynamics in linear time-invariant models.
- Uncertain Model Interconnections
Interconnect models that include systems with uncertain parameters or dynamics. - Simplifying Representation of Uncertain Objects
Simplify uncertain models built up from uncertain elements to ensure that the internal representation of the model is minimal. - Decomposing Uncertain Objects
Access the normalized LFT representation underlying uncertain models.
Model Object Basics
- What Are Model Objects?
Model objects represent linear systems as specialized data containers that encapsulate model data and attributes in a structured way. - Types of Model Objects
Model object types include numeric models, for representing systems with fixed coefficients, and generalized models for systems with tunable or uncertain coefficients.
- Control System Modeling with Model Objects
Build models that represent your control system using model objects.
Related Information
Featured Examples
Building and Manipulating Uncertain Models
Use Robust Control Toolbox™ software to build uncertain state-space models and analyze the robustness of feedback control systems with uncertain elements.

Model Gain and Phase Uncertainty in Feedback Loops
Model gain and phase uncertainty in feedback loops and check for robust stability against such uncertainty.
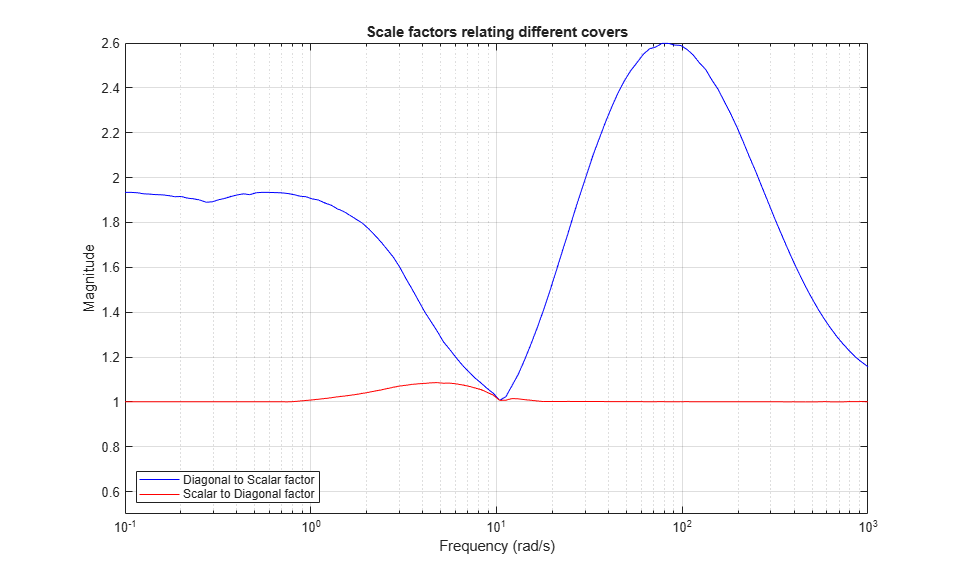
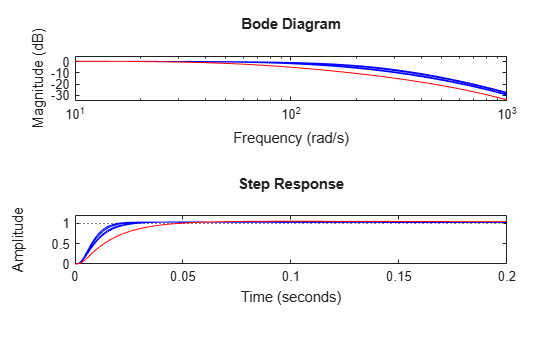
Modeling a Family of Responses as an Uncertain System
Use ucover to fit an uncertain model to a set of frequency
responses representative of the system variability. You can also use it to reduce the
complexity of an existing uncertain model.