ROS 2 Network Access
ROS Toolbox provides an interface to connect to existing ROS 2 networks, or create ROS 2 networks for desktop simulation and hardware interface with MATLAB and Simulink. You can create or access ROS 2 nodes and establish communication between them using subscribers and publishers. You can also create or access ROS 2 parameters and transformations on the network. For more information about ROS 2 nodes, see Connect to ROS 2 Network and Establish Communication.
You can create or access ROS 2 service servers that can receive requests from service clients to perform tasks and provide responses. For more information about ROS 2 services, see Explore ROS 2 Services: Service Client and Service Server Guide.
You can also create and access ROS 2 action servers that can receive goal execution request from action clients, and provide feedback during the goal execution process. From more information, see Explore ROS 2 Actions: Action Client and Action Server Guide.
Categories
- ROS 2 Network Connection and Exploration
Set up and interact with ROS 2 Networks
- ROS 2 Network Access in MATLAB
Access ROS 2 networks and messages using MATLAB
- ROS 2 Network Access in Simulink
Access ROS 2 networks and messages using Simulink
Featured Examples

Call and Provide ROS 2 Services
Set up service servers to advertise a service to the ROS network. In addition, you will learn how to use service clients to call the server and receive a response.

Access the tf Transformation Tree in ROS 2
Access tf Transformation Tree in ROS 2.

Switching Between ROS Middleware Implementations
Switch between different ROS 2 middleware implementations in MATLAB and Simulink.

Manage Quality of Service Policies in ROS 2
Description of Quality of Service (QoS) policy options that allow changing the behavior of communication within a ROS 2 network.

Manage Quality of Service Policies in ROS 2 Application with TurtleBot
Demonstrates the best practices in managing Quality of Service (QoS) policies for an application using ROS 2.

Use ROS Bridge to Establish Communication Between ROS and ROS 2
Control the TurtleBot3 in Gazebo using keyboard commands from MATLAB.

Exchange Data with ROS 2 Publishers and Subscribers
Publish and subscribe to topics in a ROS network.
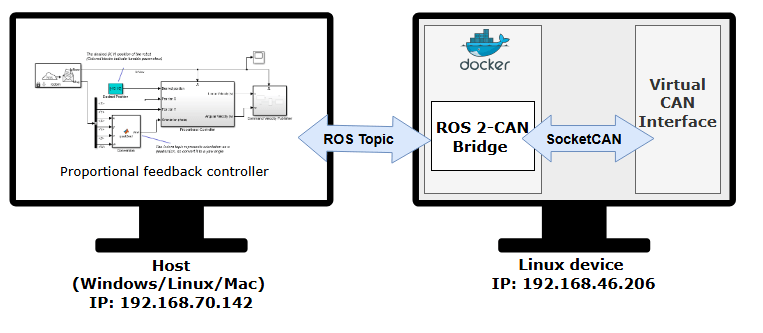
Send and Receive CAN Data in Simulink Using ROS 2-CAN Bridge Node
Design and test a feedback control algorithm in Simulink® using CAN messages exchanged between the CAN and ROS 2 network.
Plan Excavator Trajectory in ROS 2 Using Asynchronous Service Server
Use asynchronous ROS 2 service server in Simulink to plan and execute collision-free trajectories for a simulated autonomous excavator.