Work with Specialized ROS Messages
This example shows how to handle message types for laser scans, uncompressed and compressed images, point clouds, camera info, occupancy grid, and octomap messages.
These commonly used ROS messages store data in a format that requires some transformation for further processing. MATLAB® formats these specialized ROS messages for easy use.
Prerequisites: Work with Basic ROS Messages
Load Sample Messages
Load some sample messages. These messages are populated with real and synthetic data from various robotics sensors.
load("specialROSMessageData.mat")Image Messages
MATLAB provides support for image messages, which always have the message type sensor_msgs/Image.
Create an empty image message using rosmessage to see the standard ROS format for an image message.
emptyimg = rosmessage("sensor_msgs/Image",DataFormat="struct")
emptyimg = struct with fields:
MessageType: 'sensor_msgs/Image'
Header: [1×1 struct]
Height: 0
Width: 0
Encoding: ''
IsBigendian: 0
Step: 0
Data: [0×1 uint8]
For convenience, an image message that is fully populated and is stored in the img variable is loaded from specialROSMessageData.mat.
Inspect the image message variable img in your workspace. The size of the image is stored in the Width and Height properties. ROS sends the actual image data using a vector in the Data property.
img
img = struct with fields:
MessageType: 'sensor_msgs/Image'
Header: [1×1 struct]
Height: 480
Width: 640
Encoding: 'rgb8'
IsBigendian: 0
Step: 1920
Data: [921600×1 uint8]
The Data property stores raw image data that cannot be used directly for processing and visualization in MATLAB. You can use the rosReadImage function to retrieve the image in a format that is compatible with MATLAB.
imageFormatted = rosReadImage(img);
The original image has a rgb8 encoding. By default, rosReadImage returns the image in a standard 480-by-640-by-3 uint8 format. View this image using the imshow function.
imshow(imageFormatted)

MATLAB supports all ROS image encoding formats, and rosReadImage handles the complexity of converting the image data. In addition to color images, MATLAB also supports monochromatic and depth images.
Additionally, MATLAB provides the rosWriteImage function to convert a MATLAB image to a ROS message using the function. Apply rudimentary object detection on the sample image with color thresholding. Visualize the modified image.
greenPercentage = 100*double(imageFormatted(:,:,2))./sum(imageFormatted,3); thresholdImg = 255*uint8(greenPercentage > 35); imshow(thresholdImg)

Write the modified image to a ROS message with the rosWriteImage function. Since the modified image only has 1 channel and is of type uint8, use the mono8 encoding.
imageMsg = rosWriteImage(emptyimg,thresholdImg,Encoding="mono8");Compressed Image Messages
Many ROS systems send their image data in a compressed format. MATLAB provides support for these compressed image messages.
Create an empty compressed image message using rosmessage. Compressed images in ROS have the message type sensor_msgs/CompressedImage and have a standard structure.
emptyimgcomp = rosmessage("sensor_msgs/CompressedImage",DataFormat="struct")
emptyimgcomp = struct with fields:
MessageType: 'sensor_msgs/CompressedImage'
Header: [1×1 struct]
Format: ''
Data: [0×1 uint8]
For convenience, a compressed image message that is already populated was loaded from specialROSMessageData.mat.
Inspect the imgcomp variable that was captured by a camera. The Format property captures all the information that MATLAB needs to decompress the image data stored in Data.
imgcomp
imgcomp = struct with fields:
MessageType: 'sensor_msgs/CompressedImage'
Header: [1×1 struct]
Format: 'bgr8; jpeg compressed bgr8'
Data: [30376×1 uint8]
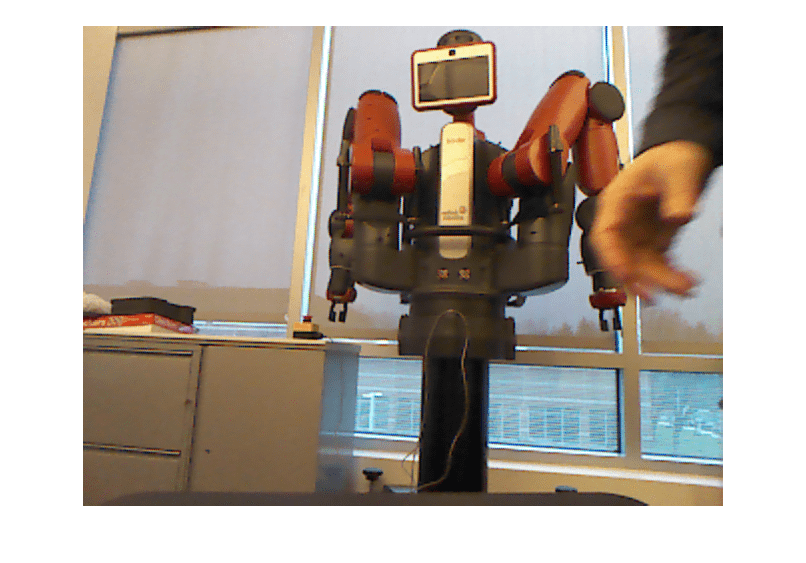
Similar to the image message, you can use rosReadImage to obtain the image in standard RGB format. Even though the original encoding for this compressed image is bgr8, rosReadImage does the conversion.
compressedFormatted = rosReadImage(imgcomp);
Visualize the image using the imshow function.
imshow(compressedFormatted)

Most image formats are supported for the compressed image message type. The 16UC1 and 32FC1 encodings are not supported for compressed depth images. Monochromatic and color image encodings are supported.
Point Cloud Messages
Point clouds can be captured by a variety of sensors used in robotics, including LIDARs, Kinect®, and stereo cameras. The most common message type in ROS for transmitting point clouds is sensor_msgs/PointCloud2 and MATLAB provides some specialized functions for you to work with this data.
You can see the standard ROS format for a point cloud message by creating an empty point cloud message.
emptyptcloud = rosmessage("sensor_msgs/PointCloud2",DataFormat="struct")
emptyptcloud = struct with fields:
MessageType: 'sensor_msgs/PointCloud2'
Header: [1×1 struct]
Height: 0
Width: 0
Fields: [0×1 struct]
IsBigendian: 0
PointStep: 0
RowStep: 0
Data: [0×1 uint8]
IsDense: 0
View the populated point cloud message that is stored in the ptcloud variable in your workspace:
ptcloud
ptcloud = struct with fields:
MessageType: 'sensor_msgs/PointCloud2'
Header: [1×1 struct]
Height: 480
Width: 640
Fields: [4×1 struct]
IsBigendian: 0
PointStep: 32
RowStep: 20480
Data: [9830400×1 uint8]
IsDense: 0
The point cloud information is encoded in the Data property of the message. You can extract the x,y,z coordinates as an N-by-3 matrix by calling the rosReadXYZ function.
xyz = rosReadXYZ(ptcloud)
xyz = 307200×3 single matrix
NaN NaN NaN
⋮
NaN in the point cloud data indicates that some of the x,y,z values are not valid. This is an artifact of the Kinect® sensor, and you can safely remove all NaN values.
xyzValid = xyz(~isnan(xyz(:,1)),:)
xyzValid = 193359×3 single matrix
0.1378 -0.6705 1.6260
⋮
Some point cloud sensors also assign RGB color values to each point in a point cloud. If these color values exist, you can retrieve them with a call to rosReadRGB.
rgb = rosReadRGB(ptcloud)
rgb = 307200×3 single matrix
0.8392 0.7059 0.5255
⋮
You can visualize the point cloud with the rosPlot function. rosPlot automatically extracts the x,y,z coordinates and the RGB color values (if they exist) and show them in a 3-D scatter plot. The rosPlot function ignores all NaN x,y,z coordinates, even if RGB values exist for that point.
rosPlot(ptcloud)

Examine all the stored fields in the point cloud message using the rosReadAllFieldNames function. The loaded point cloud message contains four fields x, y, z, and rgb.
fieldNames = rosReadAllFieldNames(ptcloud)
fieldNames = 1×4 cell array
"'x'" "'y'" "'z'" "'rgb'"
You can access the corresponding data for any field using the rosReadField function. You must unpack the returned data manually, depending on how it is formatted. For example, the RGB image can be extracted by type casting the data to uint8 and reshaping the result. Use the result from the rosReadAllFieldNames function for input validation.
if any(contains(fieldNames,"rgb")) rawData = typecast(rosReadField(ptcloud,"rgb"),"uint8"); tmp = reshape(permute(reshape(rawData,4,[]),[3,2,1]),ptcloud.Width,ptcloud.Height,4); pcImg = permute(tmp(:,:,[3,2,1]),[2 1 3]); imshow(pcImg) end
Calculate the intensity value of each point in the point cloud as 1/3(r+g+b), where r, g, and b are the RGB color values of that point, respectively.
intensity = sum(rgb,2)/3;
Write the x, y, z, RGB, and intensity values to the empty point cloud message using rosWriteXYZ, rosWriteRGB, and rosWriteIntensity functions respectively. Specify a point step size of 32.
ptcloudWithIntensity = rosWriteXYZ(emptyptcloud,xyz,PointStep=uint32(32)); ptcloudWithIntensity = rosWriteRGB(ptcloudWithIntensity,rgb); ptcloudWithIntensity = rosWriteIntensity(ptcloudWithIntensity,intensity)
ptcloudWithIntensity = struct with fields:
MessageType: 'sensor_msgs/PointCloud2'
Header: [1×1 struct]
Height: 1
Width: 307200
Fields: [5×1 struct]
IsBigendian: 0
PointStep: 32
RowStep: 9830400
Data: [9830400×1 uint8]
IsDense: 0
Octomap Messages
ROS uses Octomap messages to implement 3D occupancy grids. Octomap messages are commonly used in robotics applications, such as 3D navigation. You can see the standard ROS format for an octomap message by creating an empty message of the appropriate type.
Use rosmessage to create the message.
emptyoctomap = rosmessage("octomap_msgs/Octomap",DataFormat="struct")
emptyoctomap = struct with fields:
MessageType: 'octomap_msgs/Octomap'
Header: [1×1 struct]
Binary: 0
Id: ''
Resolution: 0
Data: [0×1 int8]
For convenience, an octomap message that is fully populated and is stored in the octomap variable loaded from specialROSMessageData.mat.
Inspect the variable octomap in your workspace. The Data field contains the octomap structure in a serialized format.
octomap
octomap = struct with fields:
MessageType: 'octomap_msgs/Octomap'
Header: [1×1 struct]
Binary: 1
Id: 'OcTree'
Resolution: 0.0250
Data: [3926×1 int8]
Create an occupancyMap3D (Navigation Toolbox) object from the ROS message using the rosReadOccupancyMap3D function. Display the 3D occupancy map using the show function.
occupancyMap3DObj = rosReadOccupancyMap3D(octomap); show(occupancyMap3DObj)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains an object of type patch.](../../examples/ros/win64/WorkWithSpecializedROSMessagesExample_06.png)
Quaternion Messages
Quaternions are commonly used in robotics to express orientation. Use rosmessage to create a quaternion message and observe the fields.
emptyquatmsg = rosmessage("geometry_msgs/Quaternion",DataFormat="struct")
emptyquatmsg = struct with fields:
MessageType: 'geometry_msgs/Quaternion'
X: 0
Y: 0
Z: 0
W: 0
For convenience, a quaternion message that represents a 90 degree rotation about the z-axis was loaded from specialROSMessageData.mat. Inspect the variable quatMsg in your workspace.
quatmsg
quatmsg = struct with fields:
MessageType: 'geometry_msgs/Quaternion'
X: 0
Y: 0
Z: 0.7071
W: 0.7071
Create a quaternion object from a ROS message using the rosReadQuaternion function. The quaternion object contains the x, y, z, and w components and provides additional functionalities, such as rotating a point.
quat = rosReadQuaternion(quatmsg);
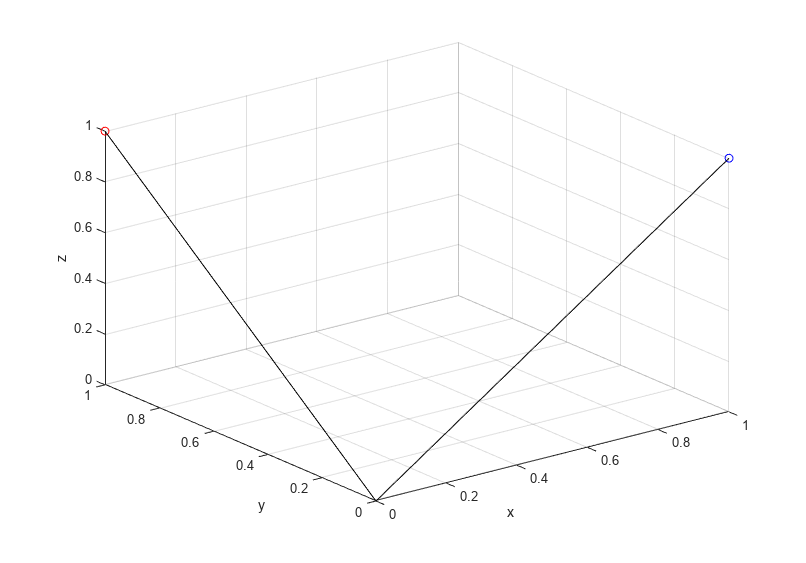
Define a point in three-dimensional space and rotate it using rotatepoint function. Visualize the two points.
cartesianPoint = [1,0,1]; plot3(cartesianPoint(1),cartesianPoint(2),cartesianPoint(3),"bo") hold on plot3([0;cartesianPoint(1)],[0;cartesianPoint(2)],[0;cartesianPoint(3)],"k") rotationResult = rotatepoint(quat,cartesianPoint); plot3(rotationResult(1),rotationResult(2),rotationResult(3),"ro") plot3([0;rotationResult(1)],[0;rotationResult(2)],[0;rotationResult(3)],"k") xlabel("x") ylabel("y") zlabel("z") grid on
Camera Info Messages
Camera calibration is a commonly used procedure in robotics vision applications. ROS provides sensor_msgs/CameraInfo message type to publish calibration information. Use rosmessage to create a camera info message and observe the fields.
emptycamerainfomsg = rosmessage("sensor_msgs/CameraInfo",DataFormat="struct")
emptycamerainfomsg = struct with fields:
MessageType: 'sensor_msgs/CameraInfo'
Header: [1×1 struct]
Height: 0
Width: 0
DistortionModel: ''
D: [0×1 double]
K: [9×1 double]
R: [9×1 double]
P: [12×1 double]
BinningX: 0
BinningY: 0
Roi: [1×1 struct]
Notably, the message stores the matrices K and P as vectors. ROS requires these matrices to be stored in row-major format. MATLAB stores matrices in column-major, hence extracting the K and P matrices requires reshaping and transposing.
The estimateCameraParameters (Computer Vision Toolbox) function can be used to create cameraParameters (Computer Vision Toolbox) and stereoParameters (Computer Vision Toolbox) objects. You can create sensor_msgs/CameraInfo messages from these objects using the rosWriteCameraInfo function. The objects must be converted to structures before use. Load the camera calibration structures.
load("calibrationStructs.mat")For convenience, the variable params loaded from calibrationStructs.mat is a fully populated cameraParameters struct. Write the cameraParameters struct to a new ROS message using the rosWriteCameraInfo function.
msg = rosWriteCameraInfo(emptycamerainfomsg,params);
The following table shows the correspondence between the cameraParameters object and the ROS message.
exampleHelperShowCameraParametersTable
ans=5×2 table
"K" "IntrinsicMatrix"
"D(1:2)" "RadialDistortion"
"D(3:5)" "TangentialDistortion"
"Height" "ImageSize(1)"
"Width" "ImageSize(2)"
Verify that the intrinsic matrix of the ROS message matches the intrinsic matrix of params.
K = reshape(msg.K,3,3)'
K = 3×3
714.1885 0 563.6481
intrinsicMatrix = params.IntrinsicMatrix'
intrinsicMatrix = 3×3
714.1885 0 563.6481
For convenience, the variable stereoParams loaded from calibrationStructs.mat is a fully populated stereoParameters struct. Write the stereoParameters struct to two new ROS messages using the rosWriteCameraInfo function.
[msg1,msg2] = rosWriteCameraInfo(msg,stereoParams);
The following table shows the correspondence between the stereoParameters object and the ROS message.
exampleHelperShowStereoParametersTable
ans=2×2 table
"P(:,1:2)" "TranslationOfCamera2(1:2)"
"inv(R1)*R2" "RotationOfCamera2"
Verify that the camera 2 rotation matrices of the ROS message and stereoParams match.
R1 = reshape(msg1.R,3,3)'; R2 = reshape(msg2.R,3,3)'; R = R1\R2
R = 3×3
1.0000 -0.0002 -0.0050
rotationOfCamera2 = stereoParams.RotationOfCamera2
rotationOfCamera2 = 3×3
1.0000 -0.0002 -0.0050
Verify that the camera 2 translation vectors of the ROS message and stereoParams match.
P = reshape(msg2.P,4,3)'; P(1:2,end)'
ans = 1×2
-119.8720 -0.4005
translationOfCamera2 = stereoParams.TranslationOfCamera2(1:2)
translationOfCamera2 = 1×2
-119.8720 -0.4005
Laser Scan Messages
Laser scanners are commonly used sensors in robotics. ROS provides sensor_msgs/LaserScan message type to publish laser scan messages. Use rosmessage to create a laser scan message and observe the fields.
emptyscan = rosmessage("sensor_msgs/LaserScan","DataFormat","struct")
emptyscan = struct with fields:
MessageType: 'sensor_msgs/LaserScan'
Header: [1×1 struct]
AngleMin: 0
AngleMax: 0
AngleIncrement: 0
TimeIncrement: 0
ScanTime: 0
RangeMin: 0
RangeMax: 0
Ranges: [0×1 single]
Intensities: [0×1 single]
Since you created an empty message, emptyscan does not contain any meaningful data. For convenience, a laser scan message that is fully populated and is stored in the scan variable was loaded from specialROSMessageData.mat.
Inspect the scan variable. The primary data in the message is in the Ranges property. The data in Ranges is a vector of obstacle distances recorded at small angle increments.
scan
scan = struct with fields:
MessageType: 'sensor_msgs/LaserScan'
Header: [1×1 struct]
AngleMin: -0.5467
AngleMax: 0.5467
AngleIncrement: 0.0017
TimeIncrement: 0
ScanTime: 0.0330
RangeMin: 0.4500
RangeMax: 10
Ranges: [640×1 single]
Intensities: [0×1 single]
You can get the scan angles from the ROS message using the rosReadScanAngles function. Visualize the scan data in polar coordinates using the polarPlot function.
angles = rosReadScanAngles(scan);
figure
polarplot(angles,scan.Ranges,LineWidth=2)
title("Laser Scan")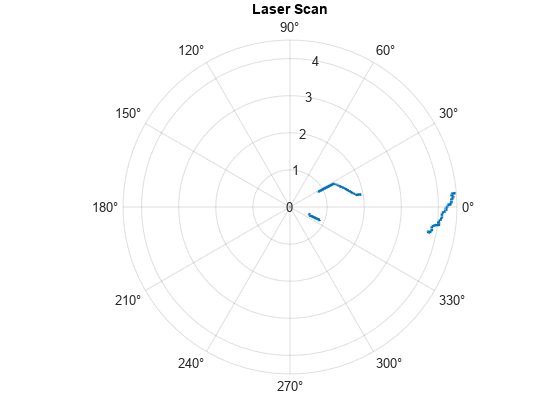
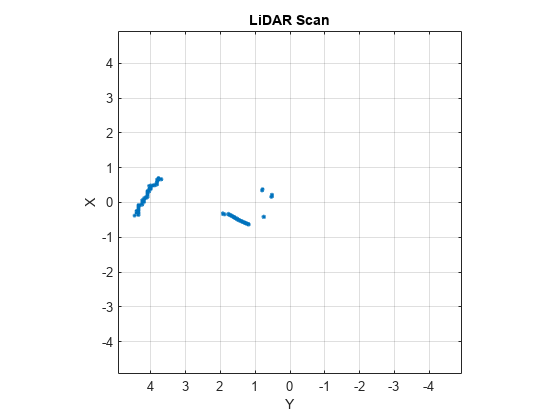
You can get the measured points in Cartesian coordinates using the rosReadCartesian function.
xy = rosReadCartesian(scan);
This populates xy with a list of [x,y] coordinates that were calculated based on all valid range readings. Visualize the scan message using the rosPlot function:
rosPlot(scan,"MaximumRange",5)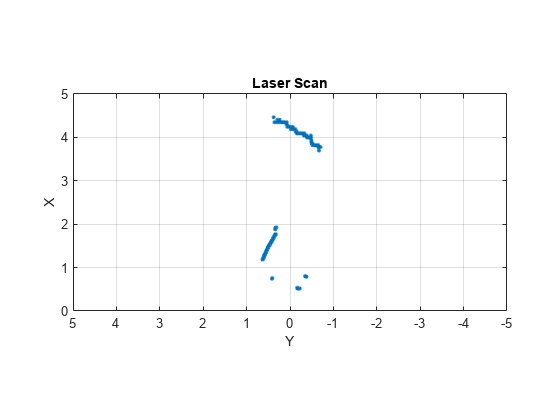
Create a lidarScan object from a ROS message using the rosReadLidarScan function. The lidarScan object contains ranges, angles, and Cartesian points and provides additional functionalities, such as transforming the scanned points. Use the transformScan function to rotate the scan point and visualize it using plot.
lidarScanObj = rosReadLidarScan(scan)
lidarScanObj =
lidarScan with properties:
Ranges: [640×1 double]
Angles: [640×1 double]
Cartesian: [640×2 double]
Count: 640
rotateScan = transformScan(lidarScanObj,[0,0,pi/2]); plot(rotateScan)
Occupancy Grid Messages
Occupancy grid messages are commonly used in robotics for 2D navigation applications**.** ROS provides nav_msgs/OccupancyGrid message type to publish occupancy grid messages. Use rosmessage to create an occupancy grid message and observe the fields.
emptyMap = rosmessage("nav_msgs/OccupancyGrid",DataFormat="struct")
emptyMap = struct with fields:
MessageType: 'nav_msgs/OccupancyGrid'
Header: [1×1 struct]
Info: [1×1 struct]
Data: [0×1 int8]
Notice that emptyMap does not contain any meaningful data. For convenience, an occupancy grid message that is fully populated and is stored in the mapMsg variable loaded from specialROSMessageData.mat.
Inspect the mapMsg variables. The occupancy grid values are encoded in the Data field.
mapMsg
mapMsg = struct with fields:
MessageType: 'nav_msgs/OccupancyGrid'
Header: [1×1 struct]
Info: [1×1 struct]
Data: [251001×1 int8]
Use the rosReadOccupancyGrid function to convert the ROS message to an occupancyMap (Navigation Toolbox) object. Use the show function to display the occupancy grid.
occupancyMapObj = rosReadOccupancyGrid(mapMsg); show(occupancyMapObj);
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](../../examples/ros/win64/WorkWithSpecializedROSMessagesExample_11.png)
You can use the occupancyMap (Navigation Toolbox) object functions to manipulate the occupancy grid. Use the inflate function to expand the occupied regions. Write the occupancyMap object to a new ROS message using the rosWriteOccupancyGrid function. Use the show function to display the new occupancy grid.
inflate(occupancyMapObj,5) occupancyMapInflatedMsg = rosWriteOccupancyGrid(mapMsg,occupancyMapObj); show(occupancyMapObj);
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](../../examples/ros/win64/WorkWithSpecializedROSMessagesExample_12.png)
Alternatively, you can create a binaryOccupancyMap (Navigation Toolbox) object from a ROS occupancy grid message using the rosReadBinaryOccupancyGrid function. A binary occupancy map holds discrete occupancy values of 0 or 1 at each cell whereas an occupancy map holds probability occupancy values that range between 0 and 1 at each cell. Use the show function to display the binary occupancy grid.
binaryMapObj = rosReadBinaryOccupancyGrid(mapMsg); show(binaryMapObj);
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](../../examples/ros/win64/WorkWithSpecializedROSMessagesExample_13.png)
Similarly, you can use the binaryOccupancyMap (Navigation Toolbox) object functions to manipulate the binary occupancy grid. Use the inflate function to alter the binary occupancy grid and create a new ROS message using the rosWriteBinaryOccupancyGrid function. Use the show function to display the new binary occupancy grid.
inflate(binaryMapObj,5) binaryMapInflatedMsg = rosWriteBinaryOccupancyGrid(mapMsg,binaryMapObj); show(binaryMapObj);
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](../../examples/ros/win64/WorkWithSpecializedROSMessagesExample_14.png)